
Page 656 - Mechanical Engineers' Handbook (Volume 2)
P. 656
4 Inner Feedback Loops 647
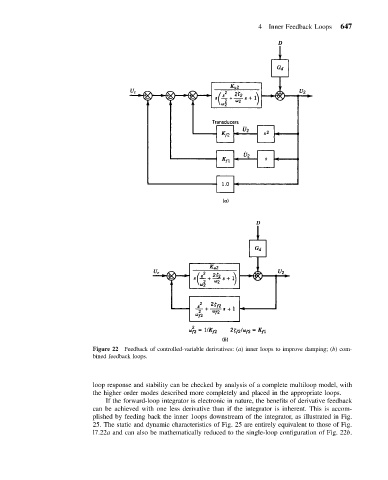
Figure 22 Feedback of controlled-variable derivatives: (a) inner loops to improve damping; (b) com-
bined feedback loops.
loop response and stability can be checked by analysis of a complete multiloop model, with
the higher order modes described more completely and placed in the appropriate loops.
If the forward-loop integrator is electronic in nature, the benefits of derivative feedback
can be achieved with one less derivative than if the integrator is inherent. This is accom-
plished by feeding back the inner 1oops downstream of the integrator, as illustrated in Fig.
25. The static and dynamic characteristics of Fig. 25 are entirely equivalent to those of Fig.
l7.22a and can also be mathematically reduced to the single-loop configuration of Fig. 22b.