
Page 664 - Mechanical Engineers' Handbook (Volume 2)
P. 664
5 Prefilters and Feedforward 655
U 7 [H (GG )] G G 3
2
1
U c 2 2 3 1 GGH 2
2
3
GGH 1 GG
2 3 2 2 3 1.0 (27)
GG 3 1 GGH 2
2
3
2
Of course, it is not possible to actually achieve the ideal result given by Eq. (27) because
of the lags associated with the lead network in the feedforward path. To illustrate the practical
aspects of feedforward, it is useful to reexamine the example of Fig. 28. If the forward-loop
integrator is electronic in nature, the use of feedforward offers some advantages over the
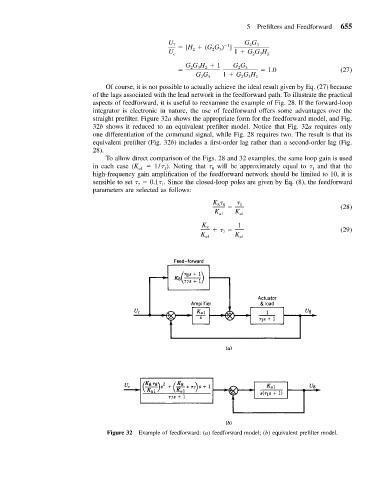
straight prefilter. Figure 32a shows the appropriate form for the feedforward model, and Fig.
32b shows it reduced to an equivalent prefilter model. Notice that Fig. 32a requires only
one differentiation of the command signal, while Fig. 28 requires two. The result is that its
equivalent prefilter (Fig. 32b) includes a first-order lag rather than a second-order lag (Fig.
28).
To allow direct comparison of the Figs. 28 and 32 examples, the same loop gain is used
in each case (K 1/ ). Noting that will be approximately equal to and that the
u1 1 8 1
high-frequency gain amplification of the feedforward network should be limited to 10, it is
sensible to set 0.1 . Since the closed-loop poles are given by Eq. (8), the feedforward
7 1
parameters are selected as follows:
K 1 (28)
88
K K
u1 u1
K 1
8 (29)
K u1 7 K u1
Figure 32 Example of feedforward: (a) feedforward model; (b) equivalent prefilter model.