
Page 793 - Mechanical Engineers' Handbook (Volume 2)
P. 793
784 Control System Design Using State-Space Methods
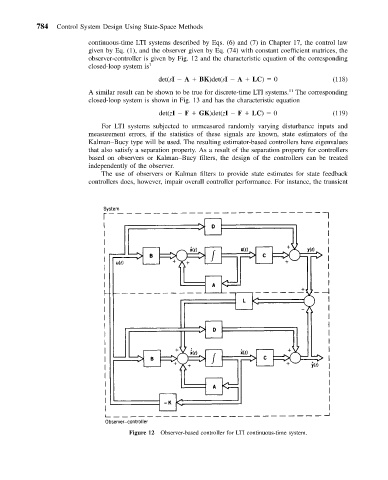
continuous-time LTI systems described by Eqs. (6) and (7) in Chapter 17, the control law
given by Eq. (1), and the observer given by Eq. (74) with constant coefficient matrices, the
observer-controller is given by Fig. 12 and the characteristic equation of the corresponding
closed-loop system is 7
det(sI A BK)det(sI A LC) 0 (118)
11
A similar result can be shown to be true for discrete-time LTI systems. The corresponding
closed-loop system is shown in Fig. 13 and has the characteristic equation
det(zI F GK)det(zI F LC) 0 (119)
For LTI systems subjected to unmeasured randomly varying disturbance inputs and
measurement errors, if the statistics of these signals are known, state estimators of the
Kalman–Bucy type will be used. The resulting estimator-based controllers have eigenvalues
that also satisfy a separation property. As a result of the separation property for controllers
based on observers or Kalman–Bucy filters, the design of the controllers can be treated
independently of the observer.
The use of observers or Kalman filters to provide state estimates for state feedback
controllers does, however, impair overall controller performance. For instance, the transient
Figure 12 Observer-based controller for LTI continuous-time system.