
Page 794 - Mechanical Engineers' Handbook (Volume 2)
P. 794
6 Observer-Based Controllers 785
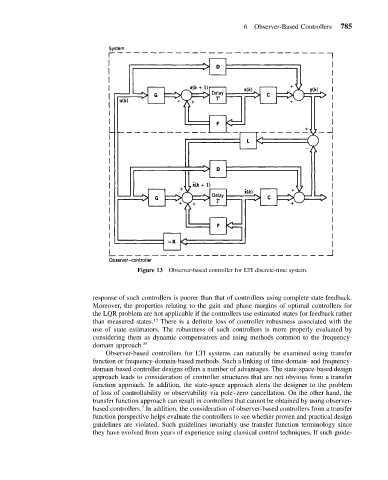
Figure 13 Observer-based controller for LTI discrete-time system.
response of such controllers is poorer than that of controllers using complete state feedback.
Moreover, the properties relating to the gain and phase margins of optimal controllers for
the LQR problem are not applicable if the controllers use estimated states for feedback rather
than measured states. 13 There is a definite loss of controller robustness associated with the
use of state estimators. The robustness of such controllers is more properly evaluated by
considering them as dynamic compensators and using methods common to the frequency-
domain approach. 35
Observer-based controllers for LTI systems can naturally be examined using transfer
function or frequency-domain-based methods. Such a linking of time-domain- and frequency-
domain-based controller designs offers a number of advantages. The state-space-based design
approach leads to consideration of controller structures that are not obvious from a transfer
function approach. In addition, the state-space approach alerts the designer to the problem
of loss of controllability or observability via pole–zero cancellation. On the other hand, the
transfer function approach can result in controllers that cannot be obtained by using observer-
7
based controllers. In addition, the consideration of observer-based controllers from a transfer
function perspective helps evaluate the controllers to see whether proven and practical design
guidelines are violated. Such guidelines invariably use transfer function terminology since
they have evolved from years of experience using classical control techniques. If such guide-