
Page 806 - Mechanical Engineers' Handbook (Volume 2)
P. 806
3 Feedback Linearization Design of NN Tracking Controllers 797
q ¨ d
Nonlinear inner loop
Nonlinear
e q
e = = = . . . ^ ^ f(x) q = . . . .
= ==
e q
r τ τ
[Λ I] K v Robot t system
[Λ I]
o
b
o
R
q d
q = q . . .
= = =
d
d R o b u s t v(t)
Robust control
term
Tracking loop
Tracking
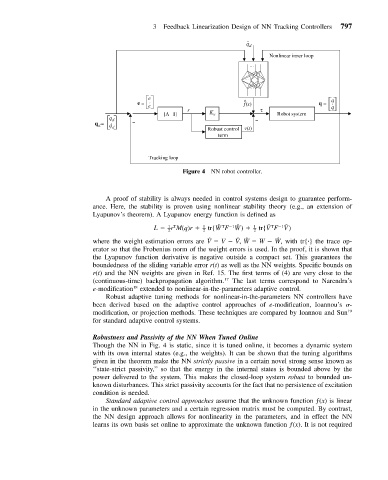
Figure 4 NN robot controller.
A proof of stability is always needed in control systems design to guarantee perform-
ance. Here, the stability is proven using nonlinear stability theory (e.g., an extension of
Lyapunov’s theorem). A Lyapunov energy function is defined as
1 ˜
˜
1 ˜
˜
1T
L –rM(q)r – tr{WF W) 1 – tr{VF V)
T
T
1
2
2
2
˜
ˆ
ˆ
˜
where the weight estimation errors are V V V, W W W , with tr{ } the trace op-
erator so that the Frobenius norm of the weight errors is used. In the proof, it is shown that
the Lyapunov function derivative is negative outside a compact set. This guarantees the
boundedness of the sliding variable error r(t) as well as the NN weights. Specific bounds on
r(t) and the NN weights are given in Ref. 15. The first terms of (4) are very close to the
(continuous-time) backpropagation algorithm. 17 The last terms correspond to Narendra’s
e-modification extended to nonlinear-in-the-parameters adaptive control.
18
Robust adaptive tuning methods for nonlinear-in-the-parameters NN controllers have
been derived based on the adaptive control approaches of e-modification, Ioannou’s -
modification, or projection methods. These techniques are compared by Ioannou and Sun 19
for standard adaptive control systems.
Robustness and Passivity of the NN When Tuned Online
Though the NN in Fig. 4 is static, since it is tuned online, it becomes a dynamic system
with its own internal states (e.g., the weights). It can be shown that the tuning algorithms
given in the theorem make the NN strictly passive in a certain novel strong sense known as
‘‘state-strict passivity,’’ so that the energy in the internal states is bounded above by the
power delivered to the system. This makes the closed-loop system robust to bounded un-
known disturbances. This strict passivity accounts for the fact that no persistence of excitation
condition is needed.
Standard adaptive control approaches assume that the unknown function ƒ(x) is linear
in the unknown parameters and a certain regression matrix must be computed. By contrast,
the NN design approach allows for nonlinearity in the parameters, and in effect the NN
learns its own basis set online to approximate the unknown function ƒ(x). It is not required