
Page 807 - Mechanical Engineers' Handbook (Volume 2)
P. 807
798 Neural Networks in Feedback Control Systems
to find a regression matrix. This is a consequence of the NN universal approximation prop-
erty.
3.2 Single-Layer NN Controller
ˆ
ˆ
ˆ
T
T
T
If the first-layer weights V are fixed so that ƒ(x) W (Vx) W (x) , with (x) selected
as a basis, then one has the simplified tuning algorithm for the output layer weights given
by
˙
ˆ
ˆ
T
W F (x)r F r W
Then, the NN is LIP and the tuning algorithm resembles those used in adaptive control.
However, NN design still offers an advantage in that the NN provides a universal basis for
a class of systems, while adaptive control requires one to find a regression matrix, which
serves as a basis for each particular system.
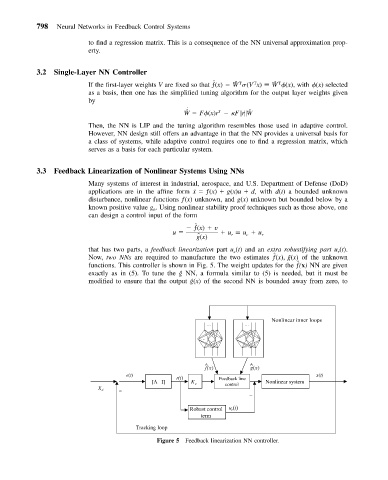
3.3 Feedback Linearization of Nonlinear Systems Using NNs
Many systems of interest in industrial, aerospace, and U.S. Department of Defense (DoD)
applications are in the affine form ˙x ƒ(x) g(x)u d , with d(t) a bounded unknown
disturbance, nonlinear functions ƒ(x) unknown, and g(x) unknown but bounded below by a
known positive value g . Using nonlinear stability proof techniques such as those above, one
b
can design a control input of the form
ˆ
ƒ(x) v
u u u u r
r
c
ˆ
g(x)
(t) and an extra robustifying part u (t).
that has two parts, a feedback linearization part u c r
ˆ
Now, two NNs are required to manufacture the two estimates ƒ(x), ˆg(x) of the unknown
ˆ
functions. This controller is shown in Fig. 5. The weight updates for the ƒ(x) NN are given
exactly as in (5). To tune the ˆg NN, a formula similar to (5) is needed, but it must be
modified to ensure that the output ˆg(x) of the second NN is bounded away from zero, to
N Nonlinear inner loops
^ ^ ^ ^^ ^
()
f(x) ) ) g(x)()
()
()
e(t) r(t) ) x(t)
[Λ I] Feedback line Nonlinear r system
e
in
a
n
N
o
[Λ I]
l
cont
control l
K v
o
r
X d
()
R o b u s t u r (t)
Robust control
term
c
Tra
Tracking loop
i
k
Figure 5 Feedback linearization NN controller.