
Page 810 - Mechanical Engineers' Handbook (Volume 2)
P. 810
5 Multiloop NN Feedback Control Structures 801
5.1 Backstepping Neurocontroller for Electrically Driven Robot
Many industrial systems have high-frequency dynamics in addition to the basic system dy-
namics being controlled. An example of such systems is the n-link rigid robot arm with
motor electrical dynamics given by
M(q)(¨q) V (q,˙q)˙q F(˙q) G(q) Ki
m
d
T
˙
Li R(i,˙q) u e
e
n
with q(t) R the joint variable, i(t) R the motor armature currents, (t) and (t) the
n
e
d
n
mechanical and electrical disturbances, and motor terminal voltage vector u (t) R the
e
control input. This plant has unknown dynamics in both the robot subsystem and the motor
subsystem.
The problem with designing a feedback controller for this system is that one desires to
control the behavior of the robot joint vector q(t); however, the available control inputs are
the motor voltages u (t), which only affect the motor torques. As a second-order effect, the
e
torques affect the joint angles.
Backstepping NN Design
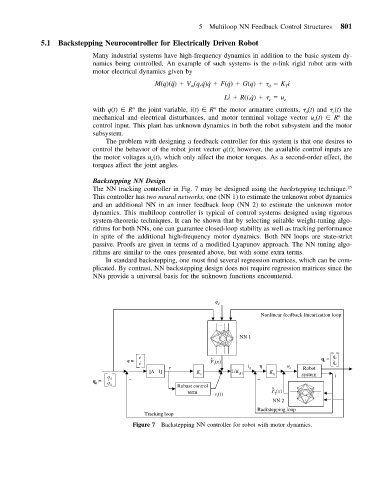
The NN tracking controller in Fig. 7 may be designed using the backstepping technique. 25
This controller has two neural networks, one (NN 1) to estimate the unknown robot dynamics
and an additional NN in an inner feedback loop (NN 2) to estimate the unknown motor
dynamics. This multiloop controller is typical of control systems designed using rigorous
system-theoretic techniques. It can be shown that by selecting suitable weight-tuning algo-
rithms for both NNs, one can guarantee closed-loop stability as well as tracking performance
in spite of the additional high-frequency motor dynamics. Both NN loops are state-strict
passive. Proofs are given in terms of a modified Lyapunov approach. The NN tuning algo-
rithms are similar to the ones presented above, but with some extra terms.
In standard backstepping, one must find several regression matrices, which can be com-
plicated. By contrast, NN backstepping design does not require regression matrices since the
NNs provide a universal basis for the unknown functions encountered.
q ¨
d
Nonlinear feedback linearization loop
NN
NN 1
e q = . q r
=
=
=
e = = = . . . ^ ^ ^ F (x) r
()
()
e 1 1 1 q r
r i d η η u e Robot
obot
R
[Λ I] K K K 1/K K K K
K
1/
[Λ I]
q r r r B B1 1 η η η system i
q = = = = q d . . . .
d
d
s
R
u
b
o
t
Robust control ^^ ^
()
term F (x)()
()
v (t) 2 2 2
i
NN
NN 2
B a c k s t e ppi
Backstepping ng loop
r
T Tracking ng loop
a
ki
c
Figure 7 Backstepping NN controller for robot with motor dynamics.