
Page 814 - Mechanical Engineers' Handbook (Volume 2)
P. 814
6 Feedforward Control Structures for Actuator Compensation 805
q ¨
d
Estimate
of nonlinear
function
NN deadzone
precompensator
τ ˆ
ˆ fx I
()
D(u)
e r w II u τ q
q d [Λ T Ι] Mechanical
- K v
- system
V
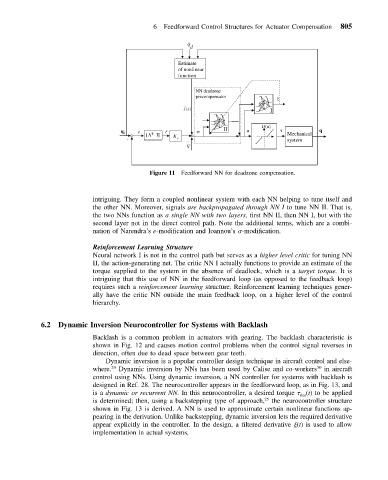
Figure 11 Feedforward NN for deadzone compensation.
intriguing. They form a coupled nonlinear system with each NN helping to tune itself and
the other NN. Moreover, signals are backpropagated through NN I to tune NN II. That is,
the two NNs function as a single NN with two layers, first NN II, then NN I, but with the
second layer not in the direct control path. Note the additional terms, which are a combi-
nation of Narendra’s e-modification and Ioannou’s -modification.
Reinforcement Learning Structure
Neural network I is not in the control path but serves as a higher level critic for tuning NN
II, the action-generating net. The critic NN I actually functions to provide an estimate of the
torque supplied to the system in the absence of deadlock, which is a target torque. It is
intriguing that this use of NN in the feedforward loop (as opposed to the feedback loop)
requires such a reinforcement learning structure. Reinforcement learning techniques gener-
ally have the critic NN outside the main feedback loop, on a higher level of the control
hierarchy.
6.2 Dynamic Inversion Neurocontroller for Systems with Backlash
Backlash is a common problem in actuators with gearing. The backlash characteristic is
shown in Fig. 12 and causes motion control problems when the control signal reverses in
direction, often due to dead space between gear teeth.
Dynamic inversion is a popular controller design technique in aircraft control and else-
where. 29 Dynamic inversion by NNs has been used by Calise and co-workers 30 in aircraft
control using NNs. Using dynamic inversion, a NN controller for systems with backlash is
designed in Ref. 28. The neurocontroller appears in the feedforward loop, as in Fig. 13, and
is a dynamic or recurrent NN. In this neurocontroller, a desired torque (t) to be applied
des
is determined; then, using a backstepping type of approach, 25 the neurocontroller structure
shown in Fig. 13 is derived. A NN is used to approximate certain nonlinear functions ap-
pearing in the derivation. Unlike backstepping, dynamic inversion lets the required derivative
appear explicitly in the controller. In the design, a filtered derivative (t) is used to allow
implementation in actual systems.