
Page 818 - Mechanical Engineers' Handbook (Volume 2)
P. 818
8 Reinforcement Learning Control Using NNs 809
Reinforcement
signal R(t) Critic
element
r (t) Utility
Robust v(t) User input: Performance
term Reference signal
K v q d (t) measurement
mechanism
q (t) z 1 =1 σ () ⋅ W
Input Preprocessing z N-1 y m-1 Control
d 1 z 2 σ () ⋅ y 1 + -
x 1 ˆ g(x) - ∑ u(t) Plant q(t)
x n-1 σ () ⋅ action
x n z N σ () ⋅ Output y m
Input Hidden layer Action-
layer
layer
generating fr (t) d(t)
neural net
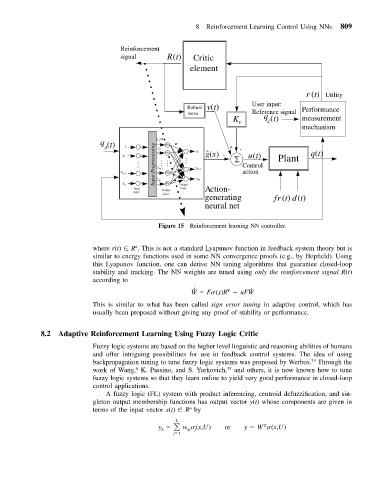
Figure 15 Reinforcement learning NN controller.
n
where r(t) R . This is not a standard Lyapunov function in feedback system theory but is
similar to energy functions used in some NN convergence proofs (e.g., by Hopfield). Using
this Lyapunov function, one can derive NN tuning algorithms that guarantee closed-loop
stability and tracking. The NN weights are tuned using only the reinforcement signal R(t)
according to
˙
ˆ
ˆ
T
W F (x)R FW
This is similar to what has been called sign error tuning in adaptive control, which has
usually been proposed without giving any proof of stability or performance.
8.2 Adaptive Reinforcement Learning Using Fuzzy Logic Critic
Fuzzy logic systems are based on the higher level linguistic and reasoning abilities of humans
and offer intriguing possibilities for use in feedback control systems. The idea of using
33
backpropagation tuning to tune fuzzy logic systems was proposed by Werbos. Through the
6
work of Wang, K. Passino, and S. Yurkovich, 35 and others, it is now known how to tune
fuzzy logic systems so that they learn online to yield very good performance in closed-loop
control applications.
A fuzzy logic (FL) system with product inferencing, centroid defuzzification, and sin-
gleton output membership functions has output vector y(t) whose components are given in
n
terms of the input vector x(t) R by
y w (x,U) or y W (x,U)
L
T
k
j 1 kj j