
Page 197 - Mechanics of Microelectromechanical Systems
P. 197
184 Chapter 4
2. THERMAL TRANSDUCTION
2.1 Introduction
The thermal actuation has the benefit of producing relatively large forces
and/or displacements but these performances come at the expense of large
input energy and at relatively low frequencies because of the time necessary
to reach thermal equilibrium (which is necessary for reproducible operation).
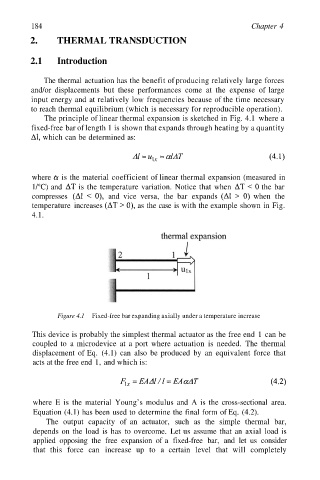
The principle of linear thermal expansion is sketched in Fig. 4.1 where a
fixed-free bar of length 1 is shown that expands through heating by a quantity
which can be determined as:
where is the material coefficient of linear thermal expansion (measured in
1/°C) and is the temperature variation. Notice that when the bar
compresses and vice versa‚ the bar expands when the
temperature increases as the case is with the example shown in Fig.
4.1.
Figure 4.1 Fixed-free bar expanding axially under a temperature increase
This device is probably the simplest thermal actuator as the free end 1 can be
coupled to a microdevice at a port where actuation is needed. The thermal
displacement of Eq. (4.1) can also be produced by an equivalent force that
acts at the free end 1‚ and which is:
where E is the material Young’s modulus and A is the cross-sectional area.
Equation (4.1) has been used to determine the final form of Eq. (4.2).
The output capacity of an actuator‚ such as the simple thermal bar‚
depends on the load is has to overcome. Let us assume that an axial load is
applied opposing the free expansion of a fixed-free bar‚ and let us consider
that this force can increase up to a certain level that will completely