
Page 80 - Mechanics of Microelectromechanical Systems
P. 80
2. Microcantilevers, microhinges, microbridges 67
in the oscillating mode – when the modal frequencies are actually monitored
and determined. They can operate in a contact mode or in a non-contact
mode (when a pre-designed distance is kept between the microcantilever and
the monitored three-dimensional topography, for instance). Functionally and
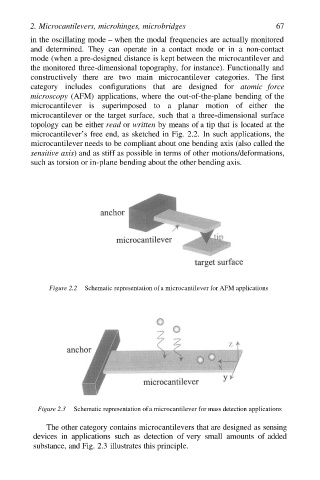
constructively there are two main microcantilever categories. The first
category includes configurations that are designed for atomic force
microscopy (AFM) applications, where the out-of-the-plane bending of the
microcantilever is superimposed to a planar motion of either the
microcantilever or the target surface, such that a three-dimensional surface
topology can be either read or written by means of a tip that is located at the
microcantilever’s free end, as sketched in Fig. 2.2. In such applications, the
microcantilever needs to be compliant about one bending axis (also called the
sensitive axis) and as stiff as possible in terms of other motions/deformations,
such as torsion or in-plane bending about the other bending axis.
Figure 2.2 Schematic representation of a microcantilever for AFM applications
Figure 2.3 Schematic representation of a microcantilever for mass detection applications
The other category contains microcantilevers that are designed as sensing
devices in applications such as detection of very small amounts of added
substance, and Fig. 2.3 illustrates this principle.