
Page 122 - Mechatronic Systems Modelling and Simulation with HDLs
P. 122
6.2 MULTIBODY MECHANICS 111
BEGIN
tforce == -b * tdisp’DOT; -- Basic equation
END simple;
Hardware description 6.3 Damper model for translational movements
6.2.4 Example: wheel suspension
Starting from these basic models we can now put together more complex models.
A wheel suspension will serve as an example. Let us first of all set up the frame-
work for the consideration of a modelling process. We assume that only the vertical
movement of the wheel and the vehicle body is to be considered. Furthermore, the
condition is imposed that the centre of gravity of the vehicle is located mainly in
the centre of the vehicle and thus the axles are uniformly loaded. In this case the
movements of the axles are almost independent of each other, which means that
we can restrict ourselves to the consideration of one axle. If we further assume
that the road conditions are the same for the left and right-hand wheel, then for
reasons of symmetry it is completely adequate to consider only one wheel includ-
ing half an axle and a quarter of the car body. Using the assumptions described
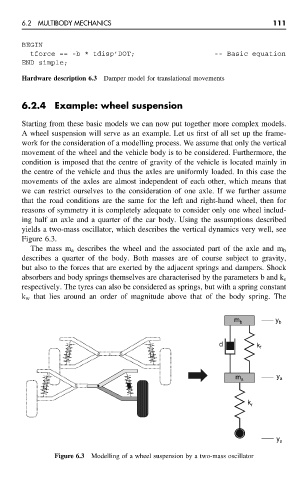
yields a two-mass oscillator, which describes the vertical dynamics very well, see
Figure 6.3.
The mass m a describes the wheel and the associated part of the axle and m b
describes a quarter of the body. Both masses are of course subject to gravity,
but also to the forces that are exerted by the adjacent springs and dampers. Shock
absorbers and body springs themselves are characterised by the parameters b and k s
respectively. The tyres can also be considered as springs, but with a spring constant
k w that lies around an order of magnitude above that of the body spring. The
m b y b
d k f
m a y a
k r
y s
Figure 6.3 Modelling of a wheel suspension by a two-mass oscillator