
Page 124 - Mechatronic Systems Modelling and Simulation with HDLs
P. 124
6.2 MULTIBODY MECHANICS 113
0.05
Excitation / m 0.03 y-position of road level
0.04
0.02
0.01
0.00
0.0 0.2 0.4 0.6 0.8 1.0
0.20
y-positions / m 0.12 y-position of wheel y-position of car body
0.16
0.08
0.04
0.0 0.2 0.4 0.6 0.8 1.0
16000
Spring force of wheel
Forces / N 8000 Spring force of spring Damping force
12000
4000
0
−4000
0.0 0.2 0.4 0.6 0.8 1.0
t / sec.
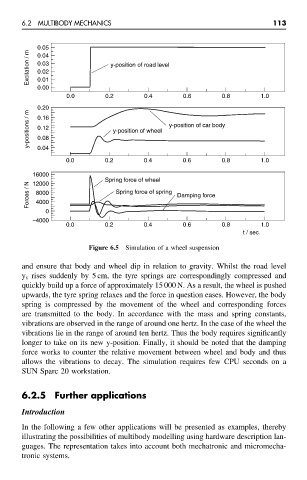
Figure 6.5 Simulation of a wheel suspension
and ensure that body and wheel dip in relation to gravity. Whilst the road level
y s rises suddenly by 5 cm, the tyre springs are correspondingly compressed and
quickly build up a force of approximately 15 000 N. As a result, the wheel is pushed
upwards, the tyre spring relaxes and the force in question eases. However, the body
spring is compressed by the movement of the wheel and corresponding forces
are transmitted to the body. In accordance with the mass and spring constants,
vibrations are observed in the range of around one hertz. In the case of the wheel the
vibrations lie in the range of around ten hertz. Thus the body requires significantly
longer to take on its new y-position. Finally, it should be noted that the damping
force works to counter the relative movement between wheel and body and thus
allows the vibrations to decay. The simulation requires few CPU seconds on a
SUN Sparc 20 workstation.
6.2.5 Further applications
Introduction
In the following a few other applications will be presented as examples, thereby
illustrating the possibilities of multibody modelling using hardware description lan-
guages. The representation takes into account both mechatronic and micromecha-
tronic systems.