
Page 120 - Mechatronic Systems Modelling and Simulation with HDLs
P. 120
6.2 MULTIBODY MECHANICS 109
In addition to the general principle there is one special case, for which the
development of arbitrarily connectable models has been known for a long time.
The prerequisite for this is that the movement in the system only takes place in
one translational or rotational dimension, or that the movements in the system
can be broken down into one-dimensional movements that are independent of
each other. Then the generalised coordinates coincide with the cartesian coordi-
nates or the angular coordinates, the Jacobi matrices are trivial and the mechanical
forces/moments and velocities/angular velocities can be represented directly by
potentials and flows. Applications are any pure translational movements and one-
dimensional rotational movements, such as in a drive train with motor, gearbox
and mechanical load. In the following suitable models for the basic elements mass,
1
spring, damper, power source and position source will be described.
Basic model
The basic elements mass, spring, and damper can be formulated for both transla-
tional and rotational movements. In the following the translational version will be
given, with positions (instead of the velocities) being used as potentials. It is for-
mulated in the hardware description language VHDL-AMS. We first begin with the
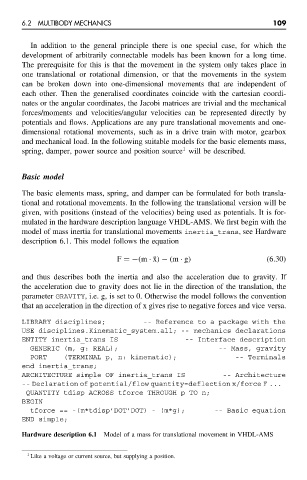
model of mass inertia for translational movements inertia_trans, see Hardware
description 6.1. This model follows the equation
F =−(m · ¨x) − (m · g) (6.30)
and thus describes both the inertia and also the acceleration due to gravity. If
the acceleration due to gravity does not lie in the direction of the translation, the
parameter GRAVITY, i.e. g, is set to 0. Otherwise the model follows the convention
that an acceleration in the direction of x gives rise to negative forces and vice versa.
LIBRARY disciplines; -- Reference to a package with the
USE disciplines.Kinematic_system.all; -- mechanics declarations
ENTITY inertia_trans IS -- Interface description
GENERIC (m, g: REAL); -- Mass, gravity
PORT (TERMINAL p, n: kinematic); -- Terminals
end inertia_trans;
ARCHITECTURE simple OF inertia_trans IS -- Architecture
-- Declaration of potential/flow quantity=deflection x/force F ...
QUANTITY tdisp ACROSS tforce THROUGH p TO n;
BEGIN
tforce == -(m*tdisp’DOT’DOT) - (m*g); -- Basic equation
END simple;
Hardware description 6.1 Model of a mass for translational movement in VHDL-AMS
1 Like a voltage or current source, but supplying a position.