
Page 61 - Mechatronic Systems Modelling and Simulation with HDLs
P. 61
50 3 MODELLING AND SIMULATION OF MIXED SYSTEMS
<u(t)> <y(t)>
p2
y(t):=g(x,u,t)
p3 y_k
<x(t)> <x(t)>
p1 <u(t)>
<u(t)> p5
init p4
u(t) <u(t)> fd=(h,h)
x(t+h):=
<x(t+h)>
x(t)+h*f(x,u,t) <x(t)>
<u(t)>
p3
<x(t+h)> <x(t)>
p7
init x_i
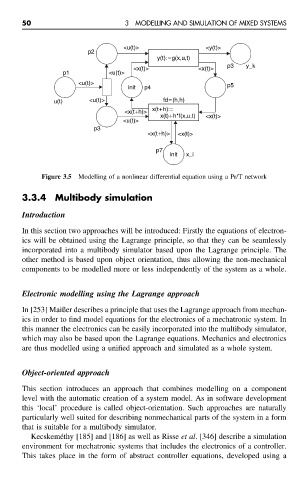
Figure 3.5 Modelling of a nonlinear differential equation using a Pr/T network
3.3.4 Multibody simulation
Introduction
In this section two approaches will be introduced: Firstly the equations of electron-
ics will be obtained using the Lagrange principle, so that they can be seamlessly
incorporated into a multibody simulator based upon the Lagrange principle. The
other method is based upon object orientation, thus allowing the non-mechanical
components to be modelled more or less independently of the system as a whole.
Electronic modelling using the Lagrange approach
In [253] Maißer describes a principle that uses the Lagrange approach from mechan-
ics in order to find model equations for the electronics of a mechatronic system. In
this manner the electronics can be easily incorporated into the multibody simulator,
which may also be based upon the Lagrange equations. Mechanics and electronics
are thus modelled using a unified approach and simulated as a whole system.
Object-oriented approach
This section introduces an approach that combines modelling on a component
level with the automatic creation of a system model. As in software development
this ‘local’ procedure is called object-orientation. Such approaches are naturally
particularly well suited for describing nonmechanical parts of the system in a form
that is suitable for a multibody simulator.
Kecskem´ ethy [185] and [186] as well as Risse et al. [346] describe a simulation
environment for mechatronic systems that includes the electronics of a controller.
This takes place in the form of abstract controller equations, developed using a