
Page 114 - Mechatronics for Safety, Security and Dependability in a New Era
P. 114
Ch21-I044963.fm Page 98 Tuesday, August 1, 2006 3:30 PM
Ch21-I044963.fm
98 98 Page 98 Tuesday, August 1, 2006 3:30 PM
Usually Newton method using Jacobian matrix has been used for solving this problem. However, this
method needs large number of iterations and takes long computing time until sufficient convergence of
solution is obtained. This computing time becomes longer as the total joint number, namely
redundancy, becomes larger. Also, the solution cannot be obtained unless the initial value of iterating
calculation is taken as an appropriate value in the vicinity of the true value. Moreover, it gives only one
solution depending on the initial value, while there may be many solutions such as right hand
configuration and left hand configuration, etc.
Considering these circumstances, a new efficient method is proposed, which solves the inverse
kinematics by utilizing analytical solution partially [3, 4]. In this paper, a simulator of robot movement
is developed based on this method. It is shown by this simulator that a 14 DOF robot can successfully
pass thorough two cylindrical holes in two thick walls, and realize a final given pose precisely.
ROBOT MODEL
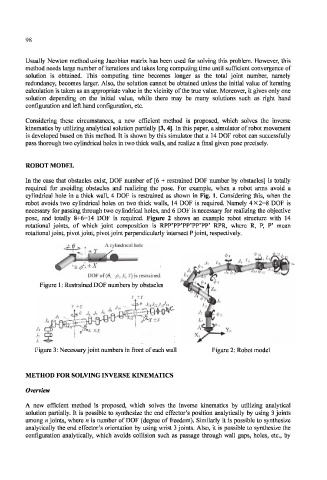
In the case that obstacles exist, DOF number of [6 + restrained DOF number by obstacles] is totally
required for avoiding obstacles and realizing the pose. For example, when a robot arms avoid a
cylindrical hole in a thick wall, 4 DOF is restrained as shown in Fig. 1. Considering this, when the
robot avoids two cylindrical holes on two thick walls, 14 DOF is required. Namely 4X2=8 DOF is
necessary for passing through two cylindrical holes, and 6 DOF is necessary for realizing the objective
pose, and totally 8+6=14 DOF is required. Figure 2 shows an example robot structure with 14
rotational joints, of which joint composition is RPP'PP'PP'PP'PP' RPR, where R, P, P' mean
rotational joint, pivot joint, pivot joint perpendicularly intersect P joint, respectively.
+ Q A cylindrical hole
±Y
*± 0-, ± X
DOF of (B, <ji, X, Y) is restrained.
Figure 1: Restrained DOF numbers by obstacles
r ±Y
7 ±Y
' ,/ 1() -'-O
Figure 3: Necessary joint numbers in front of each wall Figure 2: Robot model
METHOD FOR SOLVING INVERSE KINEMATICS
Overview
A new efficient method is proposed, which solves the inverse kinematics by utilizing analytical
solution partially. It is possible to synthesize the end effector's position analytically by using 3 joints
among n joints, where n is number of DOF (degree of freedom). Similarly it is possible to synthesize
analytically the end effector's orientation by using wrist 3 joints. Also, it is possible to synthesize the
configuration analytically, which avoids collision such as passage through wall gaps, holes, etc., by