
Page 194 - Mechatronics for Safety, Security and Dependability in a New Era
P. 194
Ch37-I044963.fm Page 178 Tuesday, August 1, 2006 3:12 PM
Ch37-I044963.fm
178
178 Page 178 Tuesday, August 1, 2006 3:12 PM
for robots to sense the human behavior.
Tn this paper, we introduce two methods for this research. One is for a case that robots do not have
any outer sensors and then know only its internal information. In this case, we do not use global
information of environment but use local one, which is described by potential of probability. The
other is for a case that robots can sense its position and orientation in its environment by some kind of
landmark method or so. In this case, robots can use global information of environment.
OBSTACLE RECOGNITION FROM HUMAN BEHAVIOR
When human and robots cooperatively transport one object, the robots can sense the human motion by
sensing the object motion. Then robots can sense human behavior, which is result of human's
environment recognition and path planning. So, by observation of this human motion, robots can
recognize obstacles without any observation of outer environment by themselves. For example, if
human who has been moving towards goal position changes its motion direction, robot can recognize
that there exist some obstacles in front of the direction. Then robot can generate following path not
to collide with the recognized obstacles.
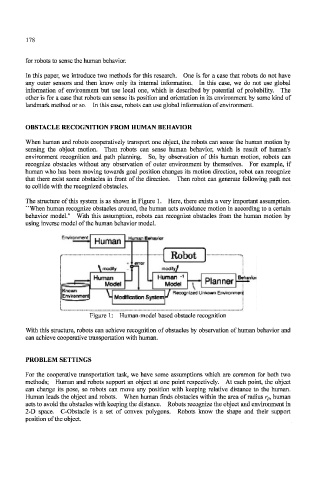
The structure of this system is as shown in Figure 1. Here, there exists a very important assumption.
"When human recognize obstacles around, the human acts avoidance motion in according to a certain
behavior model." With this assumption, robots can recognize obstacles from the human motion by
using inverse model of the human behavior model.
Human Human BatDtv'n
Robot
Human IT Human -* Befiavor
\modlif
modify/
Model Model Planner
Unfeown Env»crin»ni
ModMicaJkwi Syslem
I
Figure 1: Human-model based obstacle recognition
With this structure, robots can achieve recognition of obstacles by observation of human behavior and
can achieve cooperative transportation with human.
PROBLEM SETTINGS
For the cooperative transportation task, we have some assumptions which are common for both two
methods; Human and robots support an object at one point respectively. At each point, the object
can change its pose, so robots can move any position with keeping relative distance to the human.
Human leads the object and robots. When human finds obstacles within the area of radius r p, human
acts to avoid the obstacles with keeping the distance. Robots recognize the object and environment in
2-D space. C-Obstacle is a set of convex polygons. Robots know the shape and their support
position of the object.