
Page 195 - Mechatronics for Safety, Security and Dependability in a New Era
P. 195
Ch37-I044963.fm Page 179 Tuesday, August 1, 2006 3:12 PM
1, 2006
3:12 PM
Page 179
Tuesday, August
Ch37-I044963.fm
179
179
OBSTACLE RECOGNITION AND PATH PLANNING WITH GLOBAL INFORMATION
In this section, we introduce an obstacle recognition method in the case that robots have their global
information in environment by some way like as sensing landmarks. In this case we have additional
assumptions as followings; Robots can sense its position and orientation in the environment.
Robots have a map of the environment with some known obstacles and goal position. Human tries to
move straight towards its goal position.
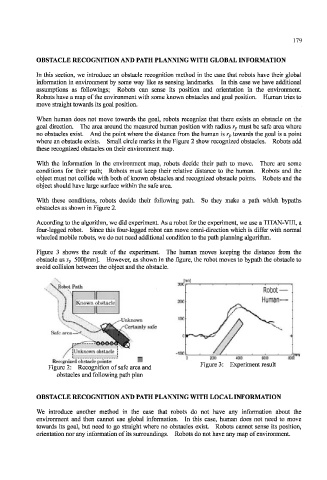
When human does not move towards the goal, robots recognize that there exists an obstacle on the
goal direction. The area around the measured human position with radius r p must be safe area where
no obstacles exist. And the point where the distance from the human is r p towards the goal is a point
where an obstacle exists. Small circle marks in the Figure 2 show recognized obstacles. Robots add
these recognized obstacles on their environment map.
With the information in the environment map, robots decide their path to move. There are some
conditions for their path; Robots must keep their relative distance to the human. Robots and the
object must not collide with both of known obstacles and recognized obstacle points. Robots and the
object should have large surface within the safe area.
With these conditions, robots decide their following path, So they make a path which bypaths
obstacles as shown in Figure 2.
According to the algorithm, we did experiment. As a robot for the experiment, we use a TITAN-VITI, a
four-legged robot. Since this four-legged robot can move omni-direction which is differ with normal
wheeled mobile robots, we do not need additional condition to the path planning algorithm.
Figure 3 shows the result of the experiment. The human moves keeping the distance from the
obstacle as r p=500[mm]. However, as shown in the figure, the robot moves to bypath the obstacle to
avoid collision between the object and the obstacle.
.Robot Path
Unknown
/'Certainly »afc
! Unknown obstacle
i -10CC
< . . .• SOQO «occ »»
vil •.|.-li r.i- 11 nil - Figure 3: Experiment result
Figure 2: Recognition of safe area and
obstacles and following path plan
OBSTACLE RECOGNITION AND PATH PLANNING WITH LOCAL INFORMATION
We introduce another method in the case that robots do not have any information about the
environment and then cannot use global information. In this case, human does not need to move
towards its goal, but need to go straight where no obstacles exist. Robots cannot sense its position,
orientation nor any information of its surroundings. Robots do not have any map of environment.