
Page 246 - Mechatronics for Safety, Security and Dependability in a New Era
P. 246
Ch47-I044963.fm Page 230 Thursday, July 27, 2006 7:59 AM
Ch47-I044963.fm
230
230 Page 230 Thursday, July 27, 2006 7:59 AM
go to position
go to position P at floor F
P at floor F
move to elevator hall —*j take elevator to floor F move to position P
hall
take elevator to floor F \—»J move
to position P
move to elevator
. . .
.
. .
omnidirectional move and push button r~+\ move to wait position r-+\ get on elevator r-** ••
ve
omnidirectional
get on elevator
and push button
move to wait position
stereo ...
stereo
.
. .
. .
.
move to button push button
manipulator
with a camera host computer
host computer
laser
range finder push button
move to button
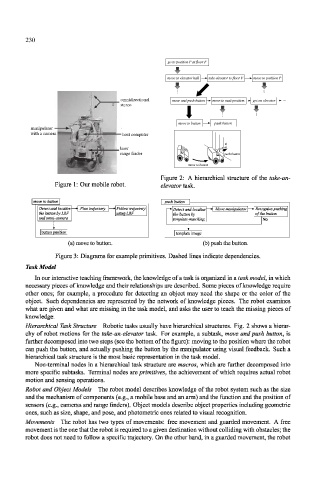
Figure 2: A hierarchical structure of the take-an-
Figure 1: Our mobile robot. elevator task.
move to button 1 push button
Detect and localize —H Plan trajectory —4 Follow trajectory Detect and local —+\ Move, manipulator]—•Recogn ize pushing
the button by LRF using LRF r the button bv of the button
and omni-camcra template-matchir S No
i
button position template image
s (a) move to button. (b) push the button,
Figure 3: Diagrams for example primitives. Dashed lines indicate dependencies.
Task Model
In our interactive teaching framework, the knowledge of a task is organized in a task model, in which
necessary pieces of knowledge and their relationships are described. Some pieces of knowledge require
other ones; for example, a procedure for detecting an object may need the shape or the color of the
object. Such dependencies are represented by the network of knowledge pieces. The robot examines
what are given and what are missing in the task model, and asks the user to teach the missing pieces of
knowledge.
Hierarchical Task Structure Robotic tasks usually have hierarchical structures. Fig. 2 shows a hierar-
chy of robot motions for the take-an-elevator task. For example, a subtask, move and push button, is
further decomposed into two steps (see the bottom of the figure): moving to the position where the robot
can push the button, and actually pushing the button by the manipulator using visual feedback. Such a
hierarchical task structure is the most basic representation in the task model.
Non-terminal nodes in a hierarchical task structure are macros, which are further decomposed into
more specific subtasks. Terminal nodes are primitives, the achievement of which requires actual robot
motion and sensing operations.
Robot and Object Models The robot model describes knowledge of the robot system such as the size
and the mechanism of components (e.g., a mobile base and an arm) and the function and the position of
sensors (e.g., cameras and range finders). Object models describe object properties including geometric
ones, such as size, shape, and pose, and photometric ones related to visual recognition.
Movements The robot has two types of movements: free movement and guarded movement. A free
movement is the one that the robot is required to a given destination without colliding with obstacles; the
robot does not need to follow a specific trajectory. On the other hand, in a guarded movement, the robot