
Page 244 - Mechatronics for Safety, Security and Dependability in a New Era
P. 244
Ch46-I044963.fm Page 228 Tuesday, August 1, 2006 3:57 PM
Ch46-I044963.fm
228
228 Page 228 Tuesday, August 1, 2006 3:57 PM
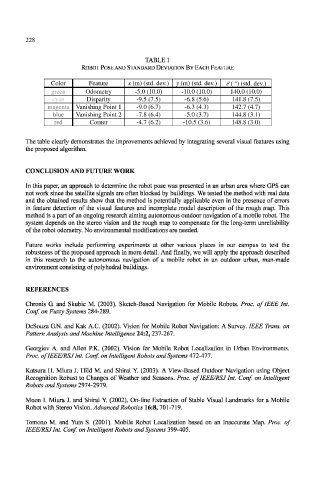
TABLE 1
ROBOT POSE AND STANDARD DEVIATION BY EACH FEATURE
Color
Color Feature x (m) (std. dev.) y (m) (std. dev.) θ ( °) (std. dev.)
y (m) (std. dev.)
x (m) (std. dev.)
Feature
0 ( °) (std. dev.)
-5.0 (10.0)
-10.0 (10.0)
green Odometry -5.0 (10.0) -10.0 (10.0) 140.0 (10.0)
green
Odometry
140.0 (10.0)
Disparity
141.8 (7.5)
cyan Disparity -9.5 (7.5) -6.8 (5.6) 141.8 (7.5)
cyan
-6.8 (5.6)
-9.5 (7.5)
magenta Vanishing Point 1 -9.0 (6.7) -6.3 (4.3) 142.7 (4.7)
-6.3 (4.3)
142.7 (4.7)
magenta
-9.0 (6.7)
Vanishing Point 1
144.8(3.1)
-7.8 (6.4)
Vanishing Point 2
blue Vanishing Point 2 -7.8 (6.4) -5.0 (3.7) 144.8 (3.1)
blue
-5.0 (3.7)
red
red Corner -4.7 (6.2) -10.5 (3.6) 148.8 (3.0)
Corner
148.8 (3.0)
-10.5 (3.6)
-4.7 (6.2)
The table clearly demonstrates the improvements achieved by integrating several visual features using
the proposed algorithm.
CONCLUSION AND FUTURE WORK
In this paper, an approach to determine the robot pose was presented in an urban area where GPS can
not work since the satellite signals are often blocked by buildings. We tested the method with real data
and the obtained results show that the method is potentially applicable even in the presence of errors
in feature detection of the visual features and incomplete model description of the rough map. This
method is a part of an ongoing research aiming autonomous outdoor navigation of a mobile robot. The
system depends on the stereo vision and the rough map to compensate for the long-term unreliability
of the robot odometry. No environmental modifications are needed.
Future works include performing experiments at other various places in our campus to test the
robustness of the proposed approach in more detail. And finally, we will apply the approach described
in this research to the autonomous navigation of a mobile robot in an outdoor urban, man-made
environment consisting of polyhedral buildings.
REFERENCES
Chronis G. and Skubic M. (2003). Sketch-Based Navigation for Mobile Robots. Proc. of IEEE Int.
Conf. on Fuzzy Systems 284-289.
DeSouza G.N. and Kak A.C. (2002). Vision for Mobile Robot Navigation: A Survey. IEEE Trans, on
Pattern Analysis and Machine Intelligence 24:2, 237-267.
Georgiev A. and Allen P.K. (2002). Vision for Mobile Robot Localization in Urban Environments.
Proc. of IEEE/RSJ Int. Conf. on Intelligent Robots and Systems 472-477'.
Katsura H. Miura J. Hild M. and Shirai Y. (2003). A View-Based Outdoor Navigation using Object
Recognition Robust to Changes of Weather and Seasons. Proc. of IEEE/RSJ Int. Conf. on Intelligent
Robots and Systems 2974-2979.
Moon I. Miura J. and Shirai Y. (2002). On-line Extraction of Stable Visual Landmarks for a Mobile
Robot with Stereo Vision. Advanced Robotics 16:8, 701-719.
Tomono M. and Yuta S. (2001). Mobile Robot Localization based on an Inaccurate Map. Proc. of
IEEE/RSJ Int. Conf on Intelligent Robots and Systems 399-405.