
Page 258 - Mechatronics for Safety, Security and Dependability in a New Era
P. 258
Ch49-I044963.fm Page 242 Tuesday, August 1, 2006 4:04 PM
Ch49-I044963.fm
242
242 Page 242 Tuesday, August 1, 2006 4:04 PM
In order to provide such microscopic operations automatically under the microscope by multiple
micro robots, we have investigated the robot navigation strategy and the precise positioning method
[4].
However, to develop more advanced microscopic biological operations in the bio cell, the more
precise and complicated microscopic operations are required. For example, when a micro injection
tool attached the micro robot is guided to a bio cell and microscopic operations such a nuclear
transplantation can be executed, then the bio cell should be fixed gently at the specified position to
keep the high success rate. For this procedure, the microscopic positioning manner of an egg cell is
required. Some precise microscopic positioning mechanisms have been studied in resent year. Those
systems using an electromagnetic field may damage bio-samples which are sensitive to environmental
change and are not suitable in order to handle a bio cell [5].
Then, we have developed a unique precise microscopic positioning mechanism which can control
bio cell in three dimensions. This mechanism can provide non-contact rotation positioning. Using this
rotational mechanism, we can get the several cell microscopic images from CCD device at every
rotating angle. These images can be reconstructed for a 3D bio cell model. This 3D model geometry
provides the precise location of the bio cell elements. This microscopic operation system by using
multiple micro robots and microscopic image recognition is reasonable and flexible compared with the
conventional system. In this paper, the experimental results of the fundamental function for this
operation system are described.
2. SYSTEM CONFIGRATION
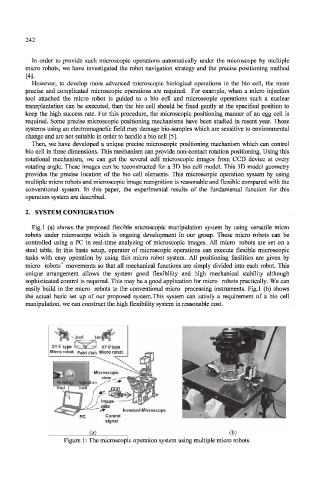
Fig.l (a) shows the proposed flexible microscopic manipulation system by using versatile micro
robots under microscope which is ongoing development in our group. These micro robots can be
controlled using a PC in real-time analyzing of microscopic images. All micro robots are set on a
steel table. In this basic setup, operator of microscopic operations can execute flexible microscopic
tasks with easy operation by using this micro robot system. All positioning facilities are given by
micro robots' movements so that all mechanical functions are simply divided into each robot. This
unique arrangement allows the system good flexibility and high mechanical stability although
sophisticated control is required. This may be a good application for micro robots practically. We can
easily build in the micro robots to the conventional micro processing instruments. Fig.l (b) shows
the actual basic set up of our proposed system.This system can satisfy a requirement of a bio cell
manipulation, we can construct the high flexibility system in reasonable cost.
XY8 type t = ± £ f c = l XYStype
Micro robot p e t r j dish Micro robot
Inversed Microscope
PC Control
signal
(a) (b)
Figure 1: The microscopic operation system using multiple micro robots.