
Page 86 - Mechatronics for Safety, Security and Dependability in a New Era
P. 86
Ch15-I044963.fm Page 70 Tuesday, August 1, 2006 12:58 PM
Ch15-I044963.fm
70 70 Page 70 Tuesday, August 1,2006 12:58 PM
order to imitate precise human body model with subject's individually. However, it is not possible
without CT/MRI because bones and muscles can't be observed from outside. It is too expensive to use
CT/MRI except for medical treatments. On the other hand, our strategy suggests to detect only small
number of parameters.
So we tried to reduce parameters to small number of observable ones such as length of upper arms,
shoulder width and so on.
We divide human body into a number of segments according to major joints, then we measure the size
of body segments. As for range of motion of joints, we adopt measuring method standardized by the
Japanese Orthopedic Association and the Japanese Association of Rehabilitation Medicine. About
center of joints, we use estimation methods suggested by medical statistics[2][3][4].
3.2. Motion Capturing
In order to detect human motions (or posture sequences) precisely, existing motion capturing systems
force us to put a number of "markers" on the surface of body. However, of course, it restricts flexible
movement of subjects in a variety of situations. On the other hand, motion capture without markers
cannot guarantee the accuracy. This is the reason we introduced "Model based Posture Analysis"
method. Tn the method we use subjects' physique.
So we developed motion capture method with a few markers and image processing.
In order to enable us to capture motion with few markers, we use subjects' physique. At first, we make
subjects' mockup with markers. Then we make the mockup to do various postures and we compare not
only markers' positions but also the mockup's outline and the captured image's region of subject.
Figure 3 shows subjects' mockup.
Result of motion capture with subjects' mockup and 6 markers (right and left of hip, both wrist, both
ankle) is shown in Figure 4. By the grace of marker, we are able to capture subject's motion with high
accuracy.
3.3. Motion evaluation/simulation
Movement:
*~~\ 's position
*
against ..-••••
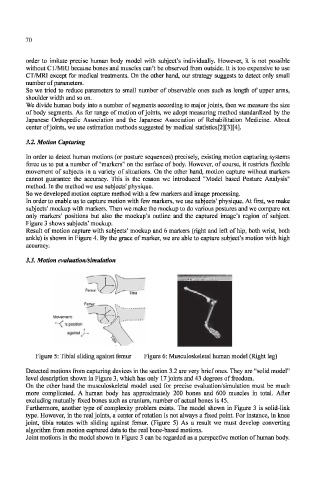
Figure 5: Tibial sliding against femur Figure 6: Musculoskeletal human model (Right leg)
Detected motions from capturing devices in the section 3.2 are very brief ones. They are "solid model"
level description shown in Figure 3, which has only 17 joints and 43 degrees of freedom.
On the other hand the musculoskeletal model used for precise evaluation/simulation must be much
more complicated. A human body has approximately 200 bones and 600 muscles in total. After
excluding mutually fixed bones such as cranium, number of actual bones is 45.
Furthermore, another type of complexity problem exists. The model shown in Figure 3 is solid-link
type. However, in the real joints, a center of rotation is not always a fixed point. For instance, in knee
joint, tibia rotates with sliding against femur. (Figure 5) As a result we must develop converting
algorithm from motion captured data to the real bone-based motions.
Joint motions in the model shown in Figure 3 can be regarded as a perspective motion of human body.