
Page 262 - Modern Control Systems
P. 262
236 Chapter 4 Feedback Control System Characteristics
An open-loop system operates without feedback and directly generates the
output in response to an input signal.
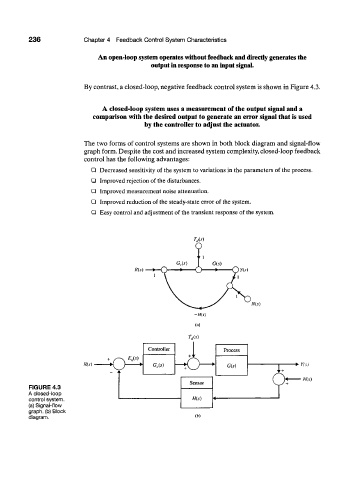
By contrast, a closed-loop, negative feedback control system is shown in Figure 4.3.
A closed-loop system uses a measurement of the output signal and a
comparison with the desired output to generate an error signal that is used
by the controller to adjust the actuator.
The two forms of control systems are shown in both block diagram and signal-flow
graph form. Despite the cost and increased system complexity, closed-loop feedback
control has the following advantages:
• Decreased sensitivity of the system to variations in the parameters of the process.
• Improved rejection of the disturbances.
• Improved measurement noise attenuation,
• Improved reduction of the steady-state error of the system.
Q Easy control and adjustment of the transient response of the system.
N(s)
W
Controller
o E t,(s)
.
R(s) 1 * GJLS) • Y(s)
FIGURE 4.3
A closed-loop
control system.
(a) Signal-flow
graph, (b) Block
diagram. (b)