
Page 50 - Modern Control Systems
P. 50
24 Chapter 1 Introduction to Control Systems
researchers have concentrated on developing technologies that work well in high
wind areas (defined to be areas with a wind speed of at least 6.7 m/s at a height of 10 m).
Most of the easily accessible high wind sites in the United States are now utilized,
and improved technology must be developed to make lower wind areas more cost
effective. New developments are required in materials and aerodynamics so that
longer turbine rotors can operate efficiently in the lower winds, and in a related
problem, the towers that support the turbine must be made taller without increasing
the overall costs. In addition, advanced controls will be required to achieve the level
of efficiency required in the wind generation drive train. •
EXAMPLE 1.3 Embedded computers
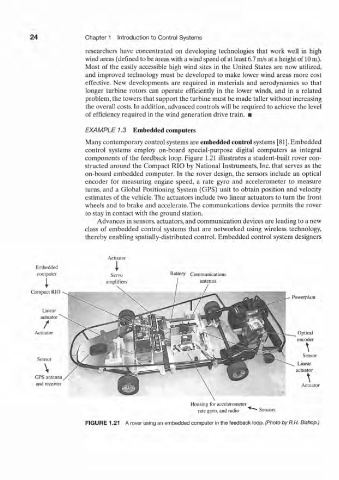
Many contemporary control systems are embedded control systems [81]. Embedded
control systems employ on-board special-purpose digital computers as integral
components of the feedback loop. Figure 1.21 illustrates a student-built rover con-
structed around the Compact RIO by National Instruments, Inc. that serves as the
on-board embedded computer. In the rover design, the sensors include an optical
encoder for measuring engine speed, a rate gyro and accelerometer to measure
turns, and a Global Positioning System (GPS) unit to obtain position and velocity
estimates of the vehicle. The actuators include two linear actuators to turn the front
wheels and to brake and accelerate. The communications device permits the rover
to stay in contact with the ground station.
Advances in sensors, actuators, and communication devices are leading to a new
class of embedded control systems that are networked using wireless technology,
thereby enabling spatially-distributed control. Embedded control system designers
Actuator
Embedded 1
Housing for accelerometer
rate gyro, and radio ^~~" Sensors
FIGURE 1.21 A rover using an embedded computer in the feedback loop. (Photo by R.H. Bishop.)