
Page 45 - Modern Control Systems
P. 45
Section 1.5 Control System Design 19
In this column remarks
relate the design topics on
the left to specific sections,
figures, equations, and tables
Topics emphasized in this example
in the example.
Establish the control goals
Shading indicates the i
topics that are emphasized
(I) Establishment of goals,
in each chapter. Some chapters
Identify the variables to be controlled variables to be controlled,
will have many shaded blocks,
and specifications.
and other chapters will emphasize
just one or two topics.
Write the specifications
Establish the system configuration
(2) System definition
^r and modeling.
Obtain a model of the process, the
actuator, and the sensor
1
•
Describe a controller and select key
parameters to be adjusted
(3) Control system design,
i r simulation, and analysis.
Optimize the parameters and
analyze the performance
I
If the performance does not meet the If the performance meets the specifications,
specifications, then iterate the configuration. then finalize the design.
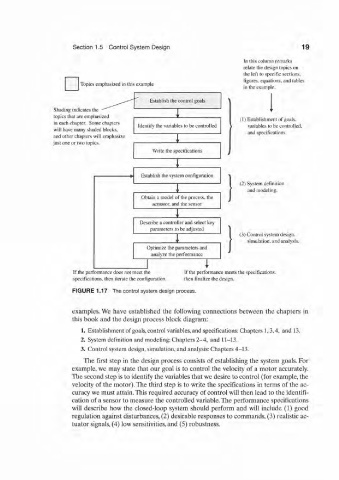
FIGURE 1.17 The control system design process.
examples. We have established the following connections between the chapters in
this book and the design process block diagram:
1. Establishment of goals, control variables, and specifications: Chapters 1,3,4, and 13.
2. System definition and modeling: Chapters 2-4, and 11-13.
3. Control system design, simulation, and analysis: Chapters 4-13.
The first step in the design process consists of establishing the system goals. For
example, we may state that our goal is to control the velocity of a motor accurately.
The second step is to identify the variables that we desire to control (for example, the
velocity of the motor). The third step is to write the specifications in terms of the ac-
curacy we must attain. This required accuracy of control will then lead to the identifi-
cation of a sensor to measure the controlled variable. The performance specifications
will describe how the closed-loop system should perform and will include (1) good
regulation against disturbances, (2) desirable responses to commands, (3) realistic ac-
tuator signals, (4) low sensitivities, and (5) robustness.