
Page 44 - Modern Robotics Building Versatile Macines
P. 44
24 Modern Robotics
extensions and capabilities, become a true robot. At Columbia,
Engelberger had met Isaac Asimov, the science fiction writer whose
robot stories have inspired several generations of robotics engineers.
Starting in 1954, Devol concentrated on developing the new machine,
called Unimate (for “Universal Automation”). Engelberger worked to
raise business interest and obtain financing to manufacture the robots.
In 1956, Engelberger and Devol founded Unimation, Inc.—the world’s
first industrial robot company.
Their robot, called Unimate, was—and is—essentially a large
“shoulder” and arm. The shoulder can move along a track to posi-
tion the arm near the materials to be manipulated. The arm can
be equipped with a variety of specialized grasping “hands” to suit
the task. The robot is programmed to perform a set of repetitive
motions. It is also equipped with various devices for aligning the
“work piece” (the object to be manipulated) and for making small
adjustments in variations.
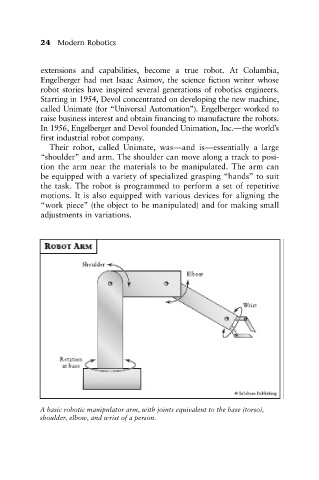
A basic robotic manipulator arm, with joints equivalent to the base (torso),
shoulder, elbow, and wrist of a person.