
Page 96 - Modern Robotics Building Versatile Macines
P. 96
76 Modern Robotics
was brought back and asked to come up with mini-rovers similar to
those some of the more innovative robotics experimenters had been
designing—machines small enough to ride along on the “better,
faster, cheaper” missions being planned.
Robots and Rovers
Building a robot that can keep itself out of trouble while navigat-
ing through its environment is hard enough. Now put that robot on
another planet, where it is not possible to make “service calls.” Even
sending commands to the robot is more complicated than on Earth,
since the radio commands can only travel at the speed of light. In the
case of a mission to Mars, the lag between sending and receiving a
signal averages about 10 minutes, depending on how far apart Earth
and Mars have moved as they follow their respective orbits.
Because of this signal lag, a rover cannot be steered like a remote-
control toy car here on Earth. Suppose an obstacle such as a rock
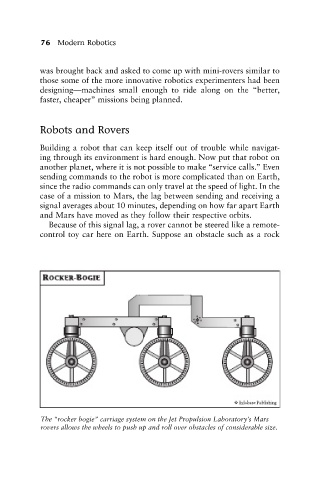
The “rocker bogie” carriage system on the Jet Propulsion Laboratory’s Mars
rovers allows the wheels to push up and roll over obstacles of considerable size.