
Page 110 - Programming the Raspberry Pi Getting Started with Python
P. 110
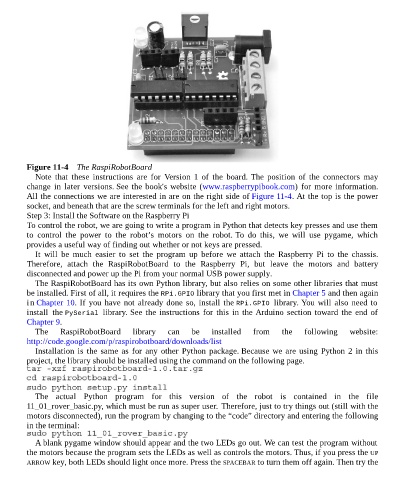
Figure 11-4 The RaspiRobotBoard
Note that these instructions are for Version 1 of the board. The position of the connectors may
change in later versions. See the book's website (www.raspberrypibook.com) for more information.
All the connections we are interested in are on the right side of Figure 11-4. At the top is the power
socket, and beneath that are the screw terminals for the left and right motors.
Step 3: Install the Software on the Raspberry Pi
To control the robot, we are going to write a program in Python that detects key presses and use them
to control the power to the robot’s motors on the robot. To do this, we will use pygame, which
provides a useful way of finding out whether or not keys are pressed.
It will be much easier to set the program up before we attach the Raspberry Pi to the chassis.
Therefore, attach the RaspiRobotBoard to the Raspberry Pi, but leave the motors and battery
disconnected and power up the Pi from your normal USB power supply.
The RaspiRobotBoard has its own Python library, but also relies on some other libraries that must
be installed. First of all, it requires the RPi.GPIO library that you first met in Chapter 5 and then again
in Chapter 10. If you have not already done so, install the RPi.GPIO library. You will also need to
install the PySerial library. See the instructions for this in the Arduino section toward the end of
Chapter 9.
The RaspiRobotBoard library can be installed from the following website:
http://code.google.com/p/raspirobotboard/downloads/list
Installation is the same as for any other Python package. Because we are using Python 2 in this
project, the library should be installed using the command on the following page.
The actual Python program for this version of the robot is contained in the file
11_01_rover_basic.py, which must be run as super user. Therefore, just to try things out (still with the
motors disconnected), run the program by changing to the “code” directory and entering the following
in the terminal:
A blank pygame window should appear and the two LEDs go out. We can test the program without
the motors because the program sets the LEDs as well as controls the motors. Thus, if you press the UP
ARROW key, both LEDs should light once more. Press the SPACEBAR to turn them off again. Then try the