
Page 267 - Renewable Energy Devices and System with Simulations in MATLAB and ANSYS
P. 267
254 Renewable Energy Devices and Systems with Simulations in MATLAB and ANSYS ®
®
ω , θ J BI
BI BI
BI
T BI d D HBI 1:N
K HBI d HGB GB GB
1
D H K HGB D J D
G
ω ,θ H GB gb1 ω , θ
H
K G G
d HB2 HB2 J H d GBG
J B2 T B3 K GBG
K HB3 ω , θ J gb2 G
B3 B3
, θ
D B2 d HB3 D B3 J ω GB GB GB
ω , θ B3 2 J G T e
B2 B2
T B2
(a)
K 2M
J'
J" WT G
K
T
T' WT e
(b)
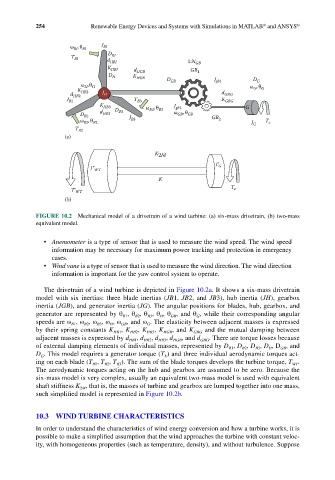
FIGURE 10.2 Mechanical model of a drivetrain of a wind turbine: (a) six-mass drivetrain, (b) two-mass
equivalent model.
• Anemometer is a type of sensor that is used to measure the wind speed. The wind speed
information may be necessary for maximum power tracking and protection in emergency
cases.
• Wind vane is a type of sensor that is used to measure the wind direction. The wind direction
information is important for the yaw control system to operate.
The drivetrain of a wind turbine is depicted in Figure 10.2a. It shows a six-mass drivetrain
model with six inertias: three blade inertias (JB1, JB2, and JB3), hub inertia (JH), gearbox
inertia (JGB), and generator inertia (JG). The angular positions for blades, hub, gearbox, and
generator are represented by θ , θ , θ , θ , θ , and θ , while their corresponding angular
B1
B3
B2
GB
H
G
speeds are ω , ω , ω , ω , ω , and ω . The elasticity between adjacent masses is expressed
B1
B3
B2
GB
H
G
by their spring constants K HB1 , K HB2 , K HB3 , K HGB , and K GBG and the mutual damping between
adjacent masses is expressed by d HB1 , d HB2 , d HB3 , d HGB , and d GBG . There are torque losses because
of external damping elements of individual masses, represented by D , D , D , D , D , and
B1
B3
B2
H
GB
D . This model requires a generator torque (T ) and three individual aerodynamic torques act-
G
E
ing on each blade (T , T , T ). The sum of the blade torques develops the turbine torque, T .
B1
B3
B2
WT
The aerodynamic torques acting on the hub and gearbox are assumed to be zero. Because the
six-mass model is very complex, usually an equivalent two-mass model is used with equivalent
shaft stiffness K , that is, the masses of turbine and gearbox are lumped together into one mass,
2M
such simplified model is represented in Figure 10.2b.
10.3 WIND TURBINE CHARACTERISTICS
In order to understand the characteristics of wind energy conversion and how a turbine works, it is
possible to make a simplified assumption that the wind approaches the turbine with constant veloc-
ity, with homogeneous properties (such as temperature, density), and without turbulence. Suppose