
Page 357 - Robot Builder's Bonanza
P. 357
326 BUILD ROBOTS WITH LEGS
Standard frame rate
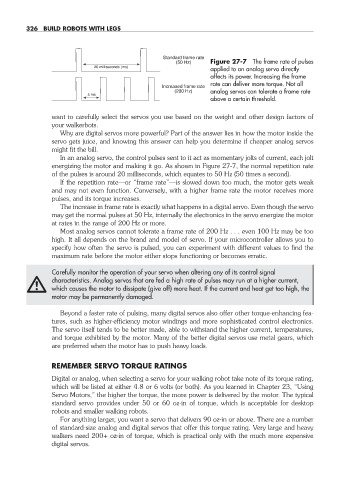
(50 Hz) Figure 27- 7 The frame rate of pulses
20 milliseconds (ms)
applied to an analog servo directly
affects its power. Increasing the frame
rate can deliver more torque. Not all
Increased frame rate
(200 Hz) analog servos can tolerate a frame rate
5 ms
above a certain threshold.
want to carefully select the servos you use based on the weight and other design factors of
your walkerbots.
Why are digital servos more powerful? Part of the answer lies in how the motor inside the
servo gets juice, and knowing this answer can help you determine if cheaper analog servos
might fit the bill.
In an analog servo, the control pulses sent to it act as momentary jolts of current, each jolt
energizing the motor and making it go. As shown in Figure 27- 7, the normal repetition rate
of the pulses is around 20 milliseconds, which equates to 50 Hz (50 times a second).
If the repetition rate— or “frame rate”—is slowed down too much, the motor gets weak
and may not even function. Conversely, with a higher frame rate the motor receives more
pulses, and its torque increases.
The increase in frame rate is exactly what happens in a digital servo. Even though the servo
may get the normal pulses at 50 Hz, internally the electronics in the servo energize the motor
at rates in the range of 200 Hz or more.
Most analog servos cannot tolerate a frame rate of 200 Hz . . . even 100 Hz may be too
high. It all depends on the brand and model of servo. If your microcontroller allows you to
specify how often the servo is pulsed, you can experiment with different values to find the
maximum rate before the motor either stops functioning or becomes erratic.
Carefully monitor the operation of your servo when altering any of its control signal
characteristics. Analog servos that are fed a high rate of pulses may run at a higher current,
which causes the motor to dissipate (give off) more heat. If the current and heat get too high, the
motor may be permanently damaged.
Beyond a faster rate of pulsing, many digital servos also offer other torque- enhancing fea-
tures, such as higher- efficiency motor windings and more sophisticated control electronics.
The servo itself tends to be better made, able to withstand the higher current, temperatures,
and torque exhibited by the motor. Many of the better digital servos use metal gears, which
are preferred when the motor has to push heavy loads.
REMEMBER SERVO TORQUE RATINGS
Digital or analog, when selecting a servo for your walking robot take note of its torque rating,
which will be listed at either 4.8 or 6 volts (or both). As you learned in Chapter 23, “Using
Servo Motors,” the higher the torque, the more power is delivered by the motor. The typical
standard servo provides under 50 or 60 oz- in of torque, which is acceptable for desktop
robots and smaller walking robots.
For anything larger, you want a servo that delivers 90 oz- in or above. There are a number
of standard- size analog and digital servos that offer this torque rating. Very large and heavy
walkers need 200+ oz- in of torque, which is practical only with the much more expensive
digital servos.
27-chapter-27.indd 326 4/21/11 11:52 AM