
Page 361 - Robot Builder's Bonanza
P. 361
330 BUILD ROBOTS WITH LEGS
to a servo, and the front legs, which
attach to the robot using a screw and
lock nut. You will make two of each style.
I’ve set the hole spacing for a six- arm
“star” servo hub, common on Futaba
and Futaba- style standard- size servos. If
you use a different hub, you’ll need to
adjust the spacing of the holes. Drill out
the holes in the hub to accommodate the
4- 40 machine screws.
Use two 4- 40 1/2″ machine screws
and nuts to attach the servo hub to the
underside of the upper leg piece. See
Figure 27- 13 for a pictorial view of the
leg pieces, separate and assembled. Note
the extra chamfering added to the cor-
ners of the upper leg pieces. This isn’t
required, but it makes the legs look a bit
more streamlined.
CUT THE BASE PIECES
Follow the cutting and drilling guide in
Figure 27- 14 to prepare the base, middle
spar, middle leg servo mount, and the
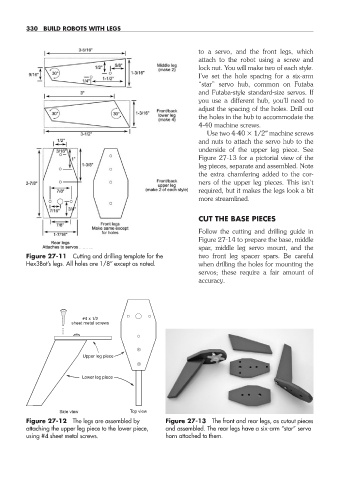
Figure 27- 11 Cutting and drilling template for the two front leg spacer spars. Be careful
Hex3Bot’s legs. All holes are 1/8″ except as noted. when drilling the holes for mounting the
servos; these require a fair amount of
accuracy.
#4 x 1/2
sheet metal screws
Upper leg piece
Lower leg piece
Side view Top view
Figure 27- 12 The legs are assembled by Figure 27- 13 The front and rear legs, as cutout pieces
attaching the upper leg piece to the lower piece, and assembled. The rear legs have a six- arm “star” servo
using #4 sheet metal screws. horn attached to them.
27-chapter-27.indd 330 4/21/11 11:52 AM