
Page 200 -
P. 200
4.3 Computer Simulation of Robotic Systems 183
control scheme. For instance, in robot control, y(t) might represent the 2n—
.
vector composed of q(t) and q (t).
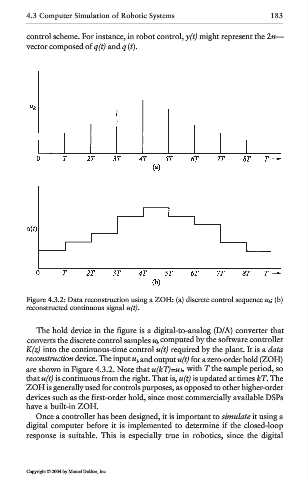
Figure 4.3.2: Data reconstruction using a ZOH: (a) discrete control sequence u k ; (b)
reconstructed continuous signal u(t).
The hold device in the figure is a digital-to-analog (D/A) converter that
converts the discrete control samples u k computed by the software controller
K(z) into the continuous-time control u(t) required by the plant. It is a data
reconstruction device. The input u k and output u(t) for a zero-order hold (ZOH)
are shown in Figure 4.3.2. Note that u(kT)=u k , with T the sample period, so
that u(t) is continuous from the right. That is, u(t) is updated at times kT. The
ZOH is generally used for controls purposes, as opposed to other higher-order
devices such as the first-order hold, since most commercially available DSPs
have a built-in ZOH.
Once a controller has been designed, it is important to simulate it using a
digital computer before it is implemented to determine if the closed-loop
response is suitable. This is especially true in robotics, since the digital
Copyright © 2004 by Marcel Dekker, Inc.