
Page 204 -
P. 204
4.4 Computed-Torque Control 187
or
(4.4.10)
which is exactly (4.4.8).
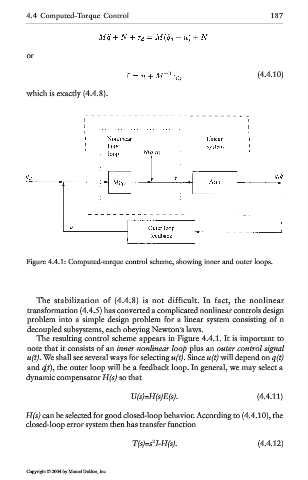
Figure 4.4.1: Computed-torque control scheme, showing inner and outer loops.
The stabilization of (4.4.8) is not difficult. In fact, the nonlinear
transformation (4.4.5) has converted a complicated nonlinear controls design
problem into a simple design problem for a linear system consisting of n
decoupled subsystems, each obeying Newton’s laws.
The resulting control scheme appears in Figure 4.4.1. It is important to
note that it consists of an inner nonlinear loop plus an outer control signal
u(t). We shall see several ways for selecting u(t). Since u(t) will depend on q(t)
.
and q(t), the outer loop will be a feedback loop. In general, we may select a
dynamic compensator H(s) so that
U(s)=H(s)E(s). (4.4.11)
H(s) can be selected for good closed-loop behavior. According to (4.4.10), the
closed-loop error system then has transfer function
2
T(s)=s I-H(s). (4.4.12)
Copyright © 2004 by Marcel Dekker, Inc.