
Page 230 -
P. 230
4.4 Computed-Torque Control 213
Let us denote this simplified linear time-invariant model of manipulator
joint i as
(4.4.53)
where the constant k m/R has been incorporated into the definitions of J and B.
According to the properties in Table 3.3.1, the disturbance d(t) is bounded,
although not generally by a constant. The bound may be a function of q(t), (t),
and even (t). This is generally ignored in a classical analysis. The effects of
d(t) are, however, somewhat ameliorated by multiplication by the gear ratio r.
The effects of joint compliance (Chapter 6) are also ignored in classical joint
control design. [For consistency with classical notation, there is a sign change
in this section in the definition of u(t) compared to our previous usage.]
Now, let us consider a few selections for the control input u(t).
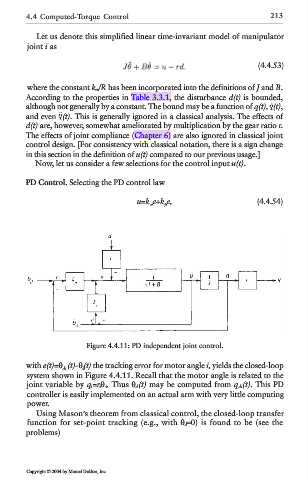
PD Control. Selecting the PD control law
u=k ve+k pe, (4.4.54)
Figure 4.4.11: PD independent joint control.
with e(t)=θ di (t)-θ i (t) the tracking error for motor angle i, yields the closed-loop
system shown in Figure 4.4.11. Recall that the motor angle is related to the
joint variable by q i =r i θ i . Thus θ d (t) may be computed from q di (t). This PD
controller is easily implemented on an actual arm with very little computing
power.
Using Mason’s theorem from classical control, the closed-loop transfer
function for set-point tracking (e.g., with θ d =0) is found to be (see the
problems)
Copyright © 2004 by Marcel Dekker, Inc.