
Page 233 -
P. 233
216 Computed-Torque Control
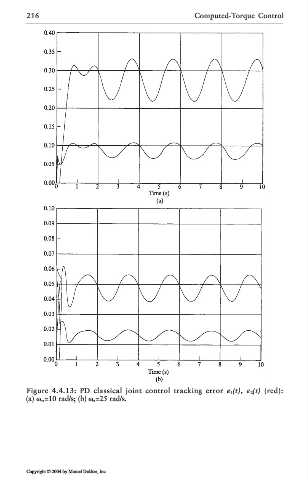
Figure 4.4.13: PD classical joint control tracking error e 1 (t), e 2 (t) (red):
(a) n=10 rad/s; (b) n=25 rad/s.
Copyright © 2004 by Marcel Dekker, Inc.