
Page 232 -
P. 232
4.4 Computed-Torque Control 215
for each joint. Also mentioned is joint-coupling control, which amounts to
adding back into u(t) some of the neglected terms in M(q) and N(q, )that
describe the interactions between the joints. Thus such corrections involve
using better estimates for and in the approximate computed-torque
control (4.4.43).
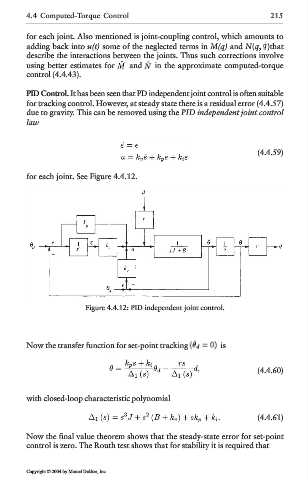
PID Control. It has been seen that PD independent joint control is often suitable
for tracking control. However, at steady state there is a residual error (4.4.57)
due to gravity. This can be removed using the PID independent joint control
law
(4.4.59)
for each joint. See Figure 4.4.12.
Figure 4.4.12: PID independent joint control.
Now the transfer function for set-point tracking is
(4.4.60)
with closed-loop characteristic polynomial
(4.4.61)
Now the final value theorem shows that the steady-state error for set-point
control is zero. The Routh test shows that for stability it is required that
Copyright © 2004 by Marcel Dekker, Inc.