
Page 250 -
P. 250
4.5 Digital Robot Control 233
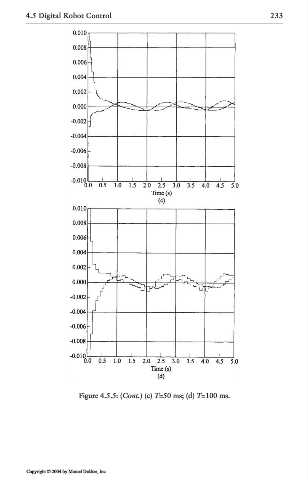
Figure 4.5.5: (Cont.) (c) T=50 ms; (d) T=100 ms.
Copyright © 2004 by Marcel Dekker, Inc.