
Page 261 - Robot Builders Source Book - Gordon McComb
P. 261
7.5 Feeding of Parts from Bins 249
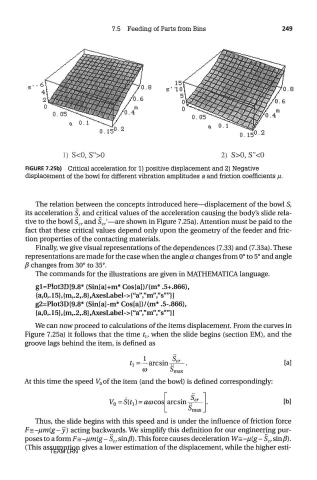
FIGURE 7.25b) Critical acceleration for 1) positive displacement and 2) Negative
displacement of the bowl for different vibration amplitudes a and friction coefficients ju.
The relation between the concepts introduced here—displacement of the bowl S,
its acceleration S, and critical values of the acceleration causing the body's slide rela-
tive to the bowl S cr and S cr'—are shown in Figure 7.25a). Attention must be paid to the
fact that these critical values depend only upon the geometry of the feeder and fric-
tion properties of the contacting materials.
Finally, we give visual representations of the dependences (7.33) and (7.33a). These
representations are made for the case when the angle a changes from 0° to 5° and angle
/3 changes from 30° to 35°.
The commands for the illustrations are given in MATHEMATICA language.
gl=Plot3D[9.8* (Sin[a]+m* Cos[a])/(m* .5+.8G6),
{a,0,.15},{m,.2,.8},AxesLabel->{"a","m","s""}]
g2=Plot3D[9.8* (Sin[a]-m* Cos[a])/(m* .5-.86G),
{a,0,.15},{m,.2,.8},AxesLabel->{"a","m","s""}]
We can now proceed to calculations of the items displacement. From the curves in
Figure 7.25a) it follows that the time t it when the slide begins (section EM), and the
groove lags behind the item, is defined as
At this time the speed V 0 of the item (and the bowl) is defined correspondingly:
Thus, the slide begins with this speed and is under the influence of friction force
F=-jum(g-y) acting backwards. We simplify this definition for our engineering pur-
poses to a form F=-jum(g - S cr sin ft). This force causes deceleration W= -fi(g- S cr sin/7).
(This assumption gives a lower estimation of the displacement, while the higher esti-
TEAM LRN