
Page 260 - Robot Builders Source Book - Gordon McComb
P. 260
248 Feeding and Orientation Devices
If S is the actual displacement of the item, then x = S cos /? and y = S sin ft. Obvi-
ously, F=juNifju is the frictional coefficient.
We now show the development of an expression for estimating the productivity of
a vibrofeeder. We begin with considering the first half-period of the oscillation (section
EM in Figure 7.25a), where S > 0 and S < 0. From (7.31) follows:
Substituting F=juN into (7.32) and excluding AT we obtain:
For the second half-period (section EK in the same figure), where S < 0 and S > 0 we
derive from (7.31) the following equations:
and correspondingly,
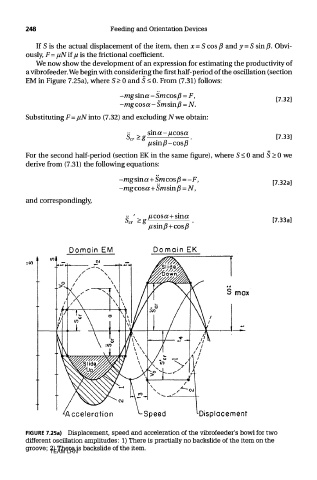
FIGURE 7.25a) Displacement, speed and acceleration of the vibrofeeder's bowl for two
different oscillation amplitudes: 1) There is practially no backslide of the item on the
groove; 2) There is backslide of the item.
TEAM LRN