
Page 42 - Robot Builders Source Book - Gordon McComb
P. 42
1.5 Nonindustrial Representatives of the Robot Family 31
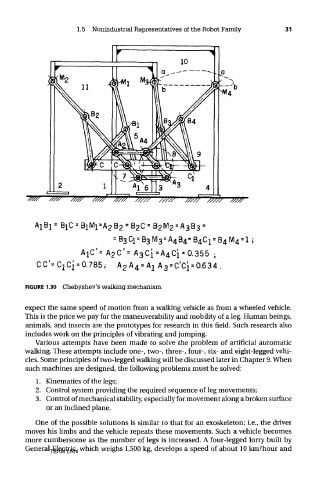
FIGURE 1.30 Chebyshev's walking mechanism.
expect the same speed of motion from a walking vehicle as from a wheeled vehicle.
This is the price we pay for the maneuverability and mobility of a leg. Human beings,
animals, and insects are the prototypes for research in this field. Such research also
includes work on the principles of vibrating and jumping.
Various attempts have been made to solve the problem of artificial automatic
walking. These attempts include one-, two-, three-, four-, six- and eight-legged vehi-
cles. Some principles of two-legged walking will be discussed later in Chapter 9. When
such machines are designed, the following problems must be solved:
1. Kinematics of the legs;
2. Control system providing the required sequence of leg movements;
3. Control of mechanical stability, especially for movement along a broken surface
or an inclined plane.
One of the possible solutions is similar to that for an exoskeleton; i.e., the driver
moves his limbs and the vehicle repeats these movements. Such a vehicle becomes
more cumbersome as the number of legs is increased. A four-legged lorry built by
General Electric, which weighs 1,500 kg, develops a speed of about 10 km/hour and
TEAM LRN