
Page 43 - Robot Builders Source Book - Gordon McComb
P. 43
32 Introduction: Brief Historical Review and Main Definitions
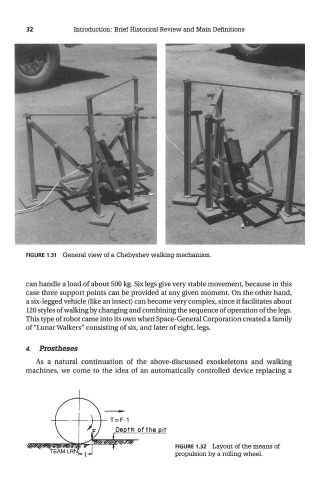
FIGURE 1.31 General view of a Chebyshev walking mechanism.
can handle a load of about 500 kg. Six legs give very stable movement, because in this
case three support points can be provided at any given moment. On the other hand,
a six-legged vehicle (like an insect) can become very complex, since it facilitates about
120 styles of walking by changing and combining the sequence of operation of the legs.
This type of robot came into its own when Space-General Corporation created a family
of "Lunar Walkers" consisting of six, and later of eight, legs.
4. Prostheses
As a natural continuation of the above-discussed exoskeletons and walking
machines, we come to the idea of an automatically controlled device replacing a
FIGURE 1.32 Layout of the means of
TEAM LRN
propulsion by a rolling wheel.