
Page 44 - Robot Builders Source Book - Gordon McComb
P. 44
1.5 Nonindustrial Representatives of the Robot Family 33
damaged or lost human limb. For these specific cases, it is of crucial importance to
shorten the time for transforming a command into an action. The time taken for the
chain of operations—from the disabled person's desire to carry out an action to the
action itself—must be minimal. In addition, the means and the system itself must be
compact and light—it must not create additional difficulties for the owner. The most
effective way of achieving this aim is to exploit the control commands given via the
bioelectricity of the relevant muscles, to amplify them, to analyze them, and to trans-
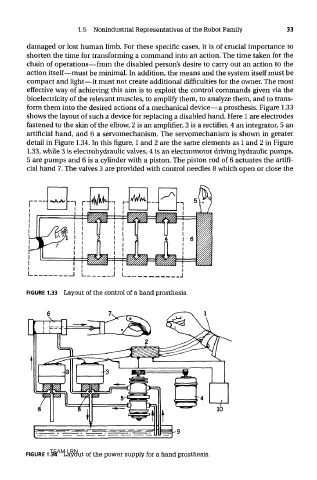
form them into the desired actions of a mechanical device—a prosthesis. Figure 1.33
shows the layout of such a device for replacing a disabled hand. Here 1 are electrodes
fastened to the skin of the elbow, 2 is an amplifier, 3 is a rectifier, 4 an integrator, 5 an
artificial hand, and 6 a servomechanism. The servomechanism is shown in greater
detail in Figure 1.34. In this figure, 1 and 2 are the same elements as 1 and 2 in Figure
1.33, while 3 is electrohydraulic valves, 4 is an electromotor driving hydraulic pumps,
5 are pumps and 6 is a cylinder with a piston. The piston rod of 6 actuates the artifi-
cial hand 7. The valves 3 are provided with control needles 8 which open or close the
FIGURE 1.33 Layout of the control of a hand prosthesis.
TEAM LRN
FIGURE 1.34 Layout of the power supply for a hand prosthesis.