
Page 38 - Robot Builders Source Book - Gordon McComb
P. 38
1.5 Nonindustrial Representatives of the Robot Family 27
A mobile robot may be controlled in one of the following ways:
• Remotely controlled by wires, cable, or radio;
• Automatically (autonomously) controlled or programmed; or
• Guided by rails, or inductive or optic means.
Mobile robots find application in the following situations:
• In harmful or hostile environments, such as under water, in a vacuum, in a
radioactive location, or in space; or
• Handling explosive, poisonous, biologically dangerous, or other suspect objects.
Let us consider here, in general, the industrial applications of mobile robots. In
some factories mobile robots are used as a means of transportation of raw materials,
intermediate and finished products, tools, and other objects. One of the problems
arising here is that of navigation. One side of the problem is the technical and algo-
rithmic solution to the creation of an automatic control system. (This solution will be
described in greater detail in Chapter 9.1.) The other side of the problem is the choice
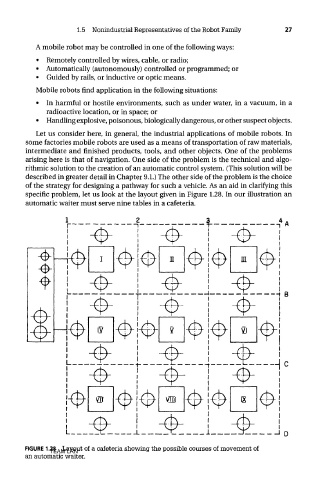
of the strategy for designing a pathway for such a vehicle. As an aid in clarifying this
specific problem, let us look at the layout given in Figure 1.28. In our illustration an
automatic waiter must serve nine tables in a cafeteria.
FIGURE 1.28 Layout of a cafeteria showing the possible courses of movement of
TEAM LRN
an automatic waiter.