
Page 157 - Robots Androids and Animatrons : 12 Incredible Projects You Can Build
P. 157
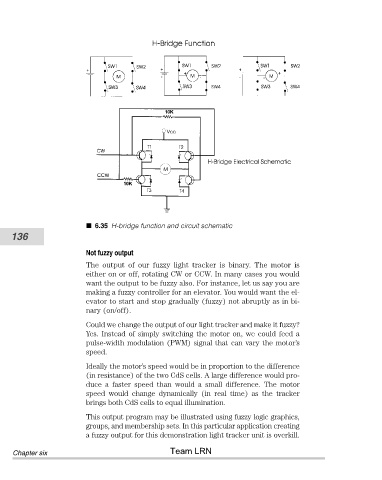
6.35 H-bridge function and circuit schematic
136
Not fuzzy output
The output of our fuzzy light tracker is binary. The motor is
either on or off, rotating CW or CCW. In many cases you would
want the output to be fuzzy also. For instance, let us say you are
making a fuzzy controller for an elevator. You would want the el-
evator to start and stop gradually (fuzzy) not abruptly as in bi-
nary (on/off).
Could we change the output of our light tracker and make it fuzzy?
Yes. Instead of simply switching the motor on, we could feed a
pulse-width modulation (PWM) signal that can vary the motor’s
speed.
Ideally the motor’s speed would be in proportion to the difference
(in resistance) of the two CdS cells. A large difference would pro-
duce a faster speed than would a small difference. The motor
speed would change dynamically (in real time) as the tracker
brings both CdS cells to equal illumination.
This output program may be illustrated using fuzzy logic graphics,
groups, and membership sets. In this particular application creating
a fuzzy output for this demonstration light tracker unit is overkill.
Team LRN
Chapter six