
Page 193 - Robots Androids and Animatrons : 12 Incredible Projects You Can Build
P. 193
172 servo 42-oz
Holes to match rear axle bracket
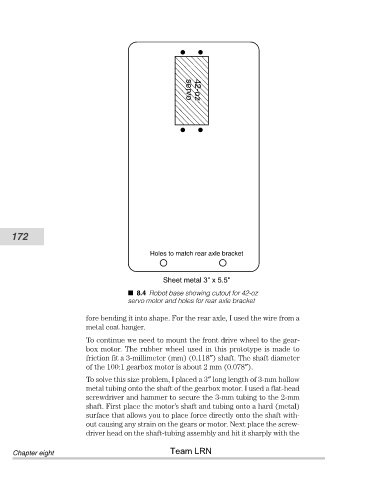
Sheet metal 3" x 5.5"
8.4 Robot base showing cutout for 42-oz
servo motor and holes for rear axle bracket
fore bending it into shape. For the rear axle, I used the wire from a
metal coat hanger.
To continue we need to mount the front drive wheel to the gear-
box motor. The rubber wheel used in this prototype is made to
friction fit a 3-millimeter (mm) (0.118″) shaft. The shaft diameter
of the 100:1 gearbox motor is about 2 mm (0.078″).
To solve this size problem, I placed a 3″ long length of 3-mm hollow
metal tubing onto the shaft of the gearbox motor. I used a flat-head
screwdriver and hammer to secure the 3-mm tubing to the 2-mm
shaft. First place the motor’s shaft and tubing onto a hard (metal)
surface that allows you to place force directly onto the shaft with-
out causing any strain on the gears or motor. Next place the screw-
driver head on the shaft-tubing assembly and hit it sharply with the
Team LRN
Chapter eight