
Page 197 - Robots Androids and Animatrons : 12 Incredible Projects You Can Build
P. 197
1
1
1
4 / 2 " 3 / 2 " 4 / 2 "
1
14 / 2 " long
Upper bracket
1" 1"
1
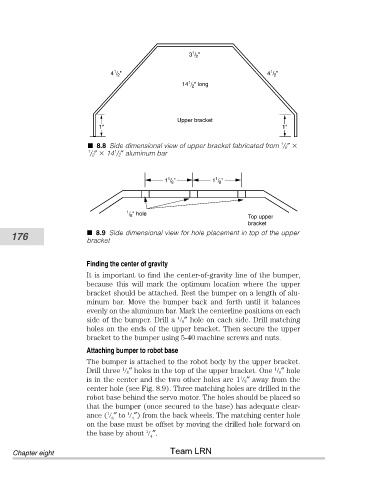
8.8 Side dimensional view of upper bracket fabricated from / 8″
1 1
/ 2″ 14 / 2″ aluminum bar
1
1
1 / 8 " 1 / 8 "
1 / 8 " hole
Top upper
bracket
8.9 Side dimensional view for hole placement in top of the upper
176
bracket
Finding the center of gravity
It is important to find the center-of-gravity line of the bumper,
because this will mark the optimum location where the upper
bracket should be attached. Rest the bumper on a length of alu-
minum bar. Move the bumper back and forth until it balances
evenly on the aluminum bar. Mark the centerline positions on each
1
side of the bumper. Drill a 8″ hole on each side. Drill matching
holes on the ends of the upper bracket. Then secure the upper
bracket to the bumper using 5-40 machine screws and nuts.
Attaching bumper to robot base
The bumper is attached to the robot body by the upper bracket.
1
1
Drill three 8″ holes in the top of the upper bracket. One 8″ hole
1
is in the center and the two other holes are 1 8″ away from the
center hole (see Fig. 8.9). Three matching holes are drilled in the
robot base behind the servo motor. The holes should be placed so
that the bumper (once secured to the base) has adequate clear-
ance ( ″ to ″) from the back wheels. The matching center hole
1
1
4
8
on the base must be offset by moving the drilled hole forward on
1
the base by about ″.
4
Team LRN
Chapter eight