
Page 202 - Robots Androids and Animatrons : 12 Incredible Projects You Can Build
P. 202
181
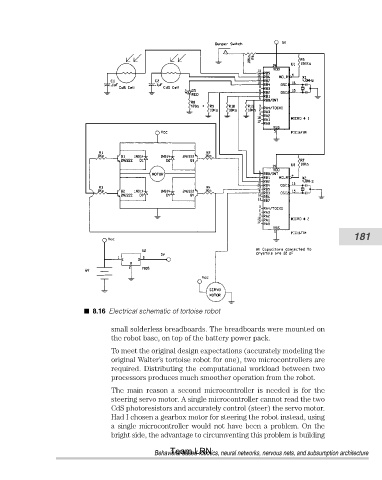
8.16 Electrical schematic of tortoise robot
small solderless breadboards. The breadboards were mounted on
the robot base, on top of the battery power pack.
To meet the original design expectations (accurately modeling the
original Walter’s tortoise robot for one), two microcontrollers are
required. Distributing the computational workload between two
processors produces much smoother operation from the robot.
The main reason a second microcontroller is needed is for the
steering servo motor. A single microcontroller cannot read the two
CdS photoresistors and accurately control (steer) the servo motor.
Had I chosen a gearbox motor for steering the robot instead, using
a single microcontroller would not have been a problem. On the
bright side, the advantage to circumventing this problem is building
Team LRN
Behavioral-based robotics, neural networks, nervous nets, and subsumption architecture