
Page 204 - Robots Androids and Animatrons : 12 Incredible Projects You Can Build
P. 204
cell receives more light than the other. If each CdS cell receives too
much light or the bump switch is activated, the robot goes into
avoid mode.
Power
Six-volt electrical power for the robot is supplied by a battery pack of
four AA batteries. While I used this power supply for testing robot
function, I suspect the batteries may wear out quickly.
Program
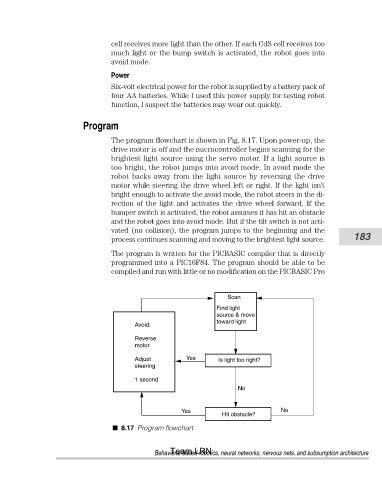
The program flowchart is shown in Fig. 8.17. Upon power-up, the
drive motor is off and the microcontroller begins scanning for the
brightest light source using the servo motor. If a light source is
too bright, the robot jumps into avoid mode. In avoid mode the
robot backs away from the light source by reversing the drive
motor while steering the drive wheel left or right. If the light isn’t
bright enough to activate the avoid mode, the robot steers in the di-
rection of the light and activates the drive wheel forward. If the
bumper switch is activated, the robot assumes it has hit an obstacle
and the robot goes into avoid mode. But if the tilt switch is not acti-
vated (no collision), the program jumps to the beginning and the
process continues scanning and moving to the brightest light source. 183
The program is written for the PICBASIC compiler that is directly
programmed into a PIC16F84. The program should be able to be
compiled and run with little or no modification on the PICBASIC Pro
Scan
Find light
source & move
toward light
Avoid:
Reverse
motor
Adjust Yes Is light too right?
steering
1 second
No
Yes No
Hit obstacle?
8.17 Program flowchart
Team LRN
Behavioral-based robotics, neural networks, nervous nets, and subsumption architecture