
Page 205 - Robots Androids and Animatrons : 12 Incredible Projects You Can Build
P. 205
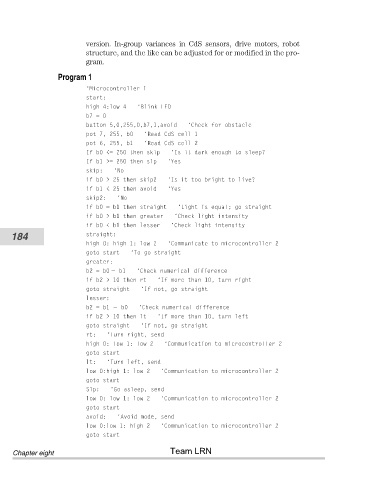
version. In-group variances in CdS sensors, drive motors, robot
structure, and the like can be adjusted for or modified in the pro-
gram.
Program 1
‘Microcontroller 1
start:
high 4:low 4 ‘Blink LED
b7 = 0
button 5,0,255,0,b7,1,avoid ‘Check for obstacle
pot 7, 255, b0 ‘Read CdS cell 1
pot 6, 255, b1 ‘Read CdS cell 2
If b0 <= 250 then skip ‘Is it dark enough to sleep?
If b1 >= 250 then slp ‘Yes
skip: ‘No
if b0 > 25 then skip2 ‘Is it too bright to live?
if b1 < 25 then avoid ‘Yes
skip2: ‘No
if b0 = b1 then straight ‘Light is equal; go straight
if b0 > b1 then greater ‘Check light intensity
if b0 < b1 then lesser ‘Check light intensity
184 straight:
high 0: high 1: low 2 ‘Communicate to microcontroller 2
goto start ‘To go straight
greater:
b2 = b0 b1 ‘Check numerical difference
if b2 > 10 then rt ‘If more than 10, turn right
goto straight ‘If not, go straight
lesser:
b2 = b1 b0 ‘Check numerical difference
if b2 > 10 then lt ‘If more than 10, turn left
goto straight ‘If not, go straight
rt: ‘Turn right, send
high 0: low 1: low 2 ‘Communication to microcontroller 2
goto start
lt: ‘Turn left, send
low 0:high 1: low 2 ‘Communication to microcontroller 2
goto start
Slp: ‘Go asleep, send
low 0: low 1: low 2 ‘Communication to microcontroller 2
goto start
avoid: ‘Avoid mode, send
low 0:low 1: high 2 ‘Communication to microcontroller 2
goto start
Team LRN
Chapter eight