
Page 72 - Robots Androids and Animatrons : 12 Incredible Projects You Can Build
P. 72
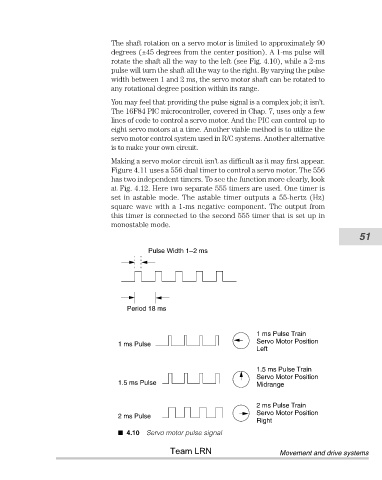
The shaft rotation on a servo motor is limited to approximately 90
degrees (±45 degrees from the center position). A 1-ms pulse will
rotate the shaft all the way to the left (see Fig. 4.10), while a 2-ms
pulse will turn the shaft all the way to the right. By varying the pulse
width between 1 and 2 ms, the servo motor shaft can be rotated to
any rotational degree position within its range.
You may feel that providing the pulse signal is a complex job; it isn’t.
The 16F84 PIC microcontroller, covered in Chap. 7, uses only a few
lines of code to control a servo motor. And the PIC can control up to
eight servo motors at a time. Another viable method is to utilize the
servo motor control system used in R/C systems. Another alternative
is to make your own circuit.
Making a servo motor circuit isn’t as difficult as it may first appear.
Figure 4.11 uses a 556 dual timer to control a servo motor. The 556
has two independent timers. To see the function more clearly, look
at Fig. 4.12. Here two separate 555 timers are used. One timer is
set in astable mode. The astable timer outputs a 55-hertz (Hz)
square wave with a 1-ms negative component. The output from
this timer is connected to the second 555 timer that is set up in
monostable mode.
51
Pulse Width 1–2 ms
Period 18 ms
1 ms Pulse Train
Servo Motor Position
1 ms Pulse
Left
1.5 ms Pulse Train
Servo Motor Position
1.5 ms Pulse Midrange
2 ms Pulse Train
Servo Motor Position
2 ms Pulse
Right
4.10 Servo motor pulse signal
Team LRN Movement and drive systems